Téléchargé 65 fois








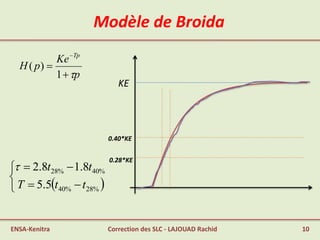
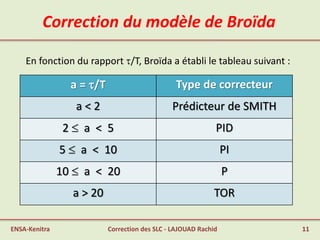
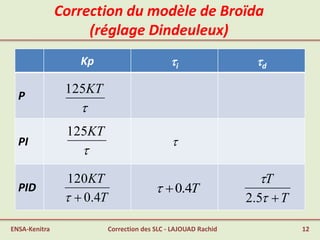








Le document traite de l'identification et de la correction des systèmes, en se concentrant sur des modèles théoriques tels que ceux de Broida et Strejc. Il présente des démarches expérimentales et des méthodes pour établir des valeurs critiques et des constantes de temps. Les systèmes présentés incluent des cas usuels de premier et deuxième ordre ainsi que des intégrateurs.















































