Téléchargé 347 fois

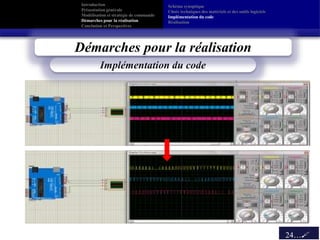
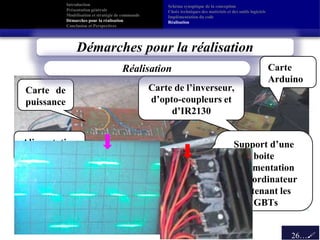


Ce document présente une étude et la réalisation d'un onduleur triphasé dans le cadre d'un projet de fin d'études en électronique. Il détaille les différentes étapes de la modélisation, de la stratégie de commande, ainsi que les démarches techniques et matérielles pour sa conception. Le projet, réalisé en collaboration avec un bureau d'étude électronique, vise à améliorer les variateurs de vitesse dans les applications de pompage photovoltaïque.








































![[C stat][co]convertisseurs statiques](https://cdn.slidesharecdn.com/ss_thumbnails/cstatcoconvertisseursstatiques-191027204605-thumbnail.jpg?width=640&height=640&fit=bounds)

