Téléchargé 376 fois


![Chapitre 1 : Modélisation du système convertisseur statique _ MAS
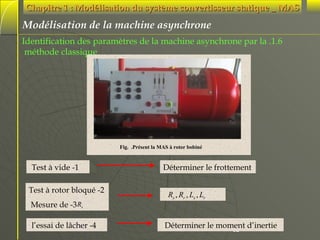
Modélisation de convertisseur et de ses commandes MLI
m = 157, r = 0.9
m = 36, r = 0.9
1 .5
(v )
1
v a ,v b ,v c ,v p
v a ,v b ,v c ,v p
(v )
1 .5
0 .5
0
1
0 .5
0
-0 . 5
-0 . 5
-1
-1
-1 . 5
-1 . 5
0
0 .0 0 2
0 .0 0 4
0 .0 0 6
0 .0 0 8
0 .0 1
0 .0 1 2
Te m p s [s ]
0 .0 1 4
0 .0 1 6
0 .0 1 8
0 .0 2
S a
0 .5
-0 . 5
0 .0 0 6
0 .0 0 8
0 .0 1
0 .0 1 2
Te m p s [s ]
0 .0 1 4
0 .0 1 6
0 .0 1 8
0 .0 2
0 .5
0
0 .0 0 2
0 .0 0 4
0 .0 0 6
S e l e c0 .t 0e 0d 8 Tse im0 p0sa1 l[:s ]10 . 0 1y 2c l e0 s. 0 1 4
g .n
c
0 .0 1 6
0 .0 1 8
-0 . 5
0 .0 2
0
0 .0 0 2
0 .0 0 4
0 .0 0 2
0 .0 0 4
S e l e c0 t. 0 0d 8 Ts e i m0 np0s1 l [: s ]10 . c0 1 2c l e0 s. 0 1 4
e
g . a
y
0 .0 0 6
0 .0 1 6
0 .0 1 8
0 .0 2
4 205 00
1 0 0
1 0 0
5 0
(v )
2 0 0
2 105 00
0
v a n
2 0 0
2 105 00
0
-5 0
0
-1 0 0
-1 5 0
-2 5 0
0
-2 0 0
-1 0 0
- 4 200 00
-
5 0
-5 0
-2 0 0
-1 5 0
0
0 .0 0 5
0
0 .0 0 2
0 .0 0 4
0 .0 0 6
0 .0 1
0 .0 0 8
TTi e m0e .p0s(1s [ s) ] 0 . 0 1 2
m
0 .0 1 5
0 .0 1 4
- 4 200 00
-
0 .0 2
0 .0 1 6
0 .0 1 8
-2 5 0
0 .0 2
0
0 .0 0 5
0
F u n d a m e n ta l (5 0 H z ) = 1 4 0 .3 , T H D = 4 2 .0 1 %
0 .0 1
T Ti e m0e.p0s(1s [ s ] 0 . 0 1 2
m
)
0 .0 0 8
0 .0 1 5
0 .0 1 4
0 .0 2
0 .0 1 6
0 .0 1 8
0 .0 2
1 5 0
S p e c tre d e V a n
Fondamental=70.686%
Déchet de tension=29.314%
1 0 0
5 0
0
0 .0 0 6
F u n d a m e n ta l (5 0 H z ) = 1 4 0 .7 , T H D = 3 .4 8 %
1 5 0
S p e c tre d e V a n
0 .0 0 4
0
4 205 00
(v )
0 .0 0 2
1
0
v a n
0
1 .5
1
S a
1 .5
0
1 0
2 0
3 0
N u m é r o d 'h a r m o n i q u e
4 0
5 0
Fondamental=70.686%
Déchet de tension=29.314%
1 0 0
5 0
0
0
1 0
2 0
3 0
N u m é r o d 'h a r m o n i q u e
Simulation de la commande MLI sinus triangle pour m = 36 , r = 0.9
4 0
5 0
5](https://image.slidesharecdn.com/asynchrone-131130153316-phpapp02/85/Moteur-Asynchrone-5-320.jpg)

![Chapitre 1 : Modélisation du système convertisseur statique _ MAS
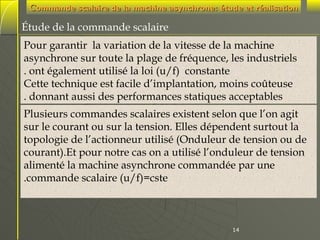
Modélisation de la machine asynchrone
:Équations Générales de la Machine Asynchrone .1.1
Équations Électriques .1.1.1
a) statorique
d
v A = R si A +
ΦA
dt
d
ΦB
v B = R s i B +
dt
d
v C = R si C +
ΦC
dt
[ VABC ] = R s [ iΦ ] +
ABC
d
[
dt
ABC
]
b) rotorique
d
va = R ria +
Φa
dt
d
v b = R ri b +
Φb
dt
d
vc = R ric +
Φc
dt
d
[ Vabc ] = R r [ i abc ] + [ Φ abc ]
dt
7](https://image.slidesharecdn.com/asynchrone-131130153316-phpapp02/85/Moteur-Asynchrone-7-320.jpg)
![Chapitre 1 : Modélisation du système convertisseur statique _ MAS
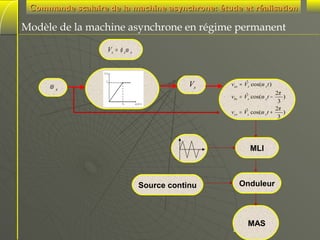
Modélisation de la machine asynchrone
: Transformation de PARK des grandeurs statorique et rotorique. 1.2
La transformation directe
La transformation inverse
[V ] = [ A ] [ V ]
dq s
[i ]
dq
s
s
[ V ] = [ A ] [V ]
−1
ABC
ABC
= [ A s ] [i ABC ]
s
−1
ABC
[A ] =
s
s
dq s
−1
ABC
cosθ s
2
− sinθ s
3
1/ 2
dq s
[ i ] = [ A ] [i ]
[ Φ ] = [ A ] [Φ ]
[Φ ] = [ A ] [ Φ ]
dq s
s
ABC
2π
cos θ s −
3
2π
− sin θ s −
3
1/ 2
s
2π
cos θ s +
3
2π
− sin θ s +
3
1/ 2
8
dq s](https://image.slidesharecdn.com/asynchrone-131130153316-phpapp02/85/Moteur-Asynchrone-8-320.jpg)


![Chapitre 1 : Modélisation du système convertisseur statique _ MAS
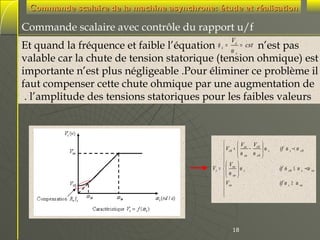
Modélisation de la machine asynchrone
250
30
27
14
200
12
20
150
10
C o u p le (N . m )
10
50
Ia (A )
V a ,V b ,V c (v )
100
0
3
0 .0
8
-5 0
-1 0
-1 0 0
8
5 .7
4
2
1 .2
0
-1 5 0
-2 0
-2
-2 0 0
-2 5 0
0
0 .0 0 5
0 .0 1
0 .0 1 5
0 .0 2
Te m p s [s ]
0 .0 2 5
0 .0 3
0 .0 3 5
-2 7
-3 0
0 .0 4
250
0
10
20
30
Te m p s [s ]
40
50
-4
60
0
30
27
20
30
Te m p s [s ]
40
50
60
0 .6
20
10
0 .4
200
0 .2
100
50
0
-5 0
10
0
Q rd ,Q rq (w b )
Ia lp h a ,Ib e ta (A )
V a lp h a , V b e t a (v )
150
3
0 .0
8
-1 0
-1 0 0
-0 .2
-0 .4
-0 .6
-1 5 0
-2 0
-0 .8
-2 0 0
-2 5 0
0
0 .0 0 5
0 .0 1
0 .0 1 5
0 .0 2
T e m p s [s ]
0 .0 2 5
0 .0 3
0 .0 3 5
-2 7
-3 0
0 .0 4
-1
0
10
20
30
Te m p s [s ]
40
50
60
-1 .2
0
10
20
30
Te m p s [s ]
40
50
60
200
30
1200
25
1000
950
190
180
20
800
V it e s s e (t r/ m )
160
15
I d , I q (A )
V d ,V q (v )
170
150
140
10
5
600
400
130
200
0
120
110
-5
0
100
-1 0
-2 0 0
0
10
20
30
Te m p s [s ]
40
50
60
0
10
20
30
Te m p s [s ]
40
50
60
0 2 .4 5
10
20
30
Te m p s [s ]
40
50
60
Simulation du modèle de la machine asynchrone
13](https://image.slidesharecdn.com/asynchrone-131130153316-phpapp02/85/Moteur-Asynchrone-13-320.jpg)



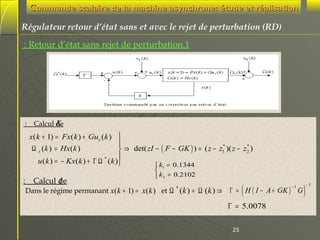
![Commande scalaire de la machine asynchrone: étude et réalisation
La commande optimale (COP)
La commande optimale est obtenue, en minimisant le critère de performance
2
: suivant
1
d Ω (t + 1)
J=
∑
2
e(t + 1) 2 + Q
2
+ R∆ u (t )
dt
2
1
d Ω (t + 1)
2
ϕ = : Avec + Q
e(t + 1)
+ R∆ u (t )2
2
dt
2
2
Ω (t + 1) − Ω (t )
1 *
2
Ω − Ω (t + 1) + Q
ϕ =
+ R [ u (t ) − u (t − 1) ]
2
Te
dϕ
= 0 pour trouver la solution optimale (loi de commande
:(il faut que
du (t )
(
)
(
)
(
)
a0b0 1 + Q ' + Q ' b0 Ω (t ) + a1b0 1 + Q ' Ω (t − 1) + R − b1b0 1 + Q ' u (t − 1)
u (t ) =
b0 2 1 + Q ' + R
(
)
22](https://image.slidesharecdn.com/asynchrone-131130153316-phpapp02/85/Moteur-Asynchrone-22-320.jpg)
![Commande scalaire de la machine asynchrone: étude et réalisation
La commande optimale (COP)
Les résultats pratique et simulation pour le régulateur COP
a. Cas de variation de vitesse et de couple
Variation de vitesse
Simulation
dépassement
(tr/min 1000 ,300 ,700 ,1000)
Pratique
27.7%
1 4 0 0
1 4 0 0
1 1 8 2 .7
1 0 4 3 .3
1 0 0 0
9 5 0
de perturbation
1 2 7 7
1 1 8 2 .7
1 0 0 0
9 5 0
V it e s s e (t r/ m )
1 2 7 7
V it e s s e (t r/ m )
Variation de couple
(Cr = 0, 1.2, 0 n.m)
rejet
8 0 0
7 0 0
6 0 0
4 0 0
8 0 0
6 0 0
tr=2 s
3 0 0
2 0 0
4 0 0
2 0 0
0
0
-2 0 0
-2 0 0
0
2
5 .3
1 0
1 5
2 0
2 5
3 0
T e m p s [s ]
4 0
4 5
5 0
6 0
8
0
2
5 .3
1 0
2 0
3 0
T e m p s [s ]
4 0
5 0
6 0
0
5 .3
1 0
2 0
3 0
T e m p s [s ]
4 0
5 0
6 0
0
5 .3
1 0
2 0
3 0
T e m p s [s ]
4 0
5 0
6 0
7
6 .3
6 .0 5
5
4 .5
4
C o u p le (N . m )
C o u p le (N . m )
6 .3
6 .0 5
5 .4
2
0
3
2
1 .2
0
-1 .3
-2 .1
-2 .4
-3 .1
-4
4
-2 .4
0
5 .3
1 0
1 5
2 0
2 5
3 0
T e m p s [s ]
4 0
4 5
5 0
-3
6 0
2 5
2 5
2 1 .5
2 1 .5
1 5
1 0
C o u ra n t (A )
C o u ra n t (A )
1 2 .8
1 0
6 .3
5
0 .8 8
0
-5
-6 .3
-1 0
-1 2 .8
5
3
0 .8 8
0
-5
-1 0
-1 5
-2 1 .5
-2 5
24
-2 1 .5
0
5 .3
1 0
1 5 1 7 .6
2 5 2 7 .6
T e m p s [s ]
4 0
4 5
4 9 .6
6 0
-2 5](https://image.slidesharecdn.com/asynchrone-131130153316-phpapp02/85/Moteur-Asynchrone-24-320.jpg)
![Commande scalaire de la machine asynchrone: étude et réalisation
Régulateur retour d’état sans et avec le rejet de perturbation (RD)
Résultats de pratique et de simulation pour le régulateur Retour d’état sans.1.1
perturbation
rejet de perturbation
dépassement
Simulation
Variation de vitesse
0%(tr/min 1000 ,300 ,700 ,1000)
Variation de couple
(Cr = 0, 1.2, 0 n.m)
Pratique
1200
1200
1000
950
1000
950
800
800
700
600
V it e s s e (t r/ m )
V it e s s e (t r/ m )
600
400
300
400
200
200
0
0
-2 0 0
0 2
10
20
30
T e m p s [s ]
40
50
60
-2 0 0
0 2
10
20
30
T e m p s [s ]
40
50
60
26](https://image.slidesharecdn.com/asynchrone-131130153316-phpapp02/85/Moteur-Asynchrone-26-320.jpg)

![Commande scalaire de la machine asynchrone: étude et réalisation
Régulateur retour d’état sans et avec le rejet de perturbation (RD)
: Résultats de pratique et de simulation pour le régulateur RD avec le rejet .2.1
a. Cas de variation de vitesse et de couple
rejet
Variation de vitesse
(tr/min 1000 ,300 ,700 ,1000)
dépassement
32%
Simulation
Pratique 1 4 0 0
1 4 0 0
1 0 0 0
9 5 0
V it e s s e ( t r / m )
1 2 0 0
1 0 0 0
V it e s s e (t r/ m )
de perturbation
1 3 2 0
1 2 0 0
8 0 0
6 0 0
4 0 0
8 0 0
6 0 0
tr=1.94 s
2 0 0
-2 0 0
4 0 0
2 0 0
0
0
-2 0 0
0
1 0
2 0
3 0
T e m p s [s ]
4 0
5 0
6 0
1 2
01 .9 4
5 .8
1 0
2 0
3 0
T e m p s [s ]
4 0
5 0
6 0
1 0
2 0
3 0
T e m p s [s ]
4 0
5 0
6 0
1 0
2 0
3 0
T e m p s [s ]
4 0
5 0
6 0
1 2
1 0
1 0
8
8
6 .2 6
C o u p le (N . m )
C o u p le (N . m )
Variation de couple
(Cr = 0, 1.2, 0 n.m)
4
2
0
-1 .1 5
-2
- 2 .. 5
-2 8
6 .2 6
4
2
1 .2
0
-2
-2 .5
-5 .4
-7 .5
-8
-4
0
1 0
1 5
2 0
2 5
3 0
T e m p s [s ]
4 0
4 5
5 0
-5 .4
-6
6 0
3 0
2 0
0
4 0
3 0
2 7 .5
2 0
1 4
1 1
C o u ra n t (A )
C o u ra n t (A )
4 0
0 .0
8
1 1
3
0 .0
8
-1 1
-1 4
-1 1
-2 0
-2 0
-2 7 .5
-3 0
-3 0
-4 0
0
5
1 0
1 5 6 .8
1
2 5 6 .8
2
T e m p s [s ]
4 0
4 5
4 8
6 0
-4 0
28
0
5](https://image.slidesharecdn.com/asynchrone-131130153316-phpapp02/85/Moteur-Asynchrone-28-320.jpg)
![Commande scalaire de la machine asynchrone: étude et réalisation
Régulateur retour d’état sans et avec le rejet de perturbation (RD)
Comparaison des résultats pour les régulateurs RD et COP
a. Cas de variation de vitesse et de couple
COP
Variation de vitesse
14 00
13 10
RD
140 0
131 0
1 1 8 2 .7
8 00
80 0
100 0
95 0
V it e s s e ( t r / m )
V it e s s e (t r/ m )
1 1 8 2 .7
11 20
10 40
10 00
9 50
Variation de couple
7 00
6 00
4 00
60 0
Simulation
40 0
3 00
2 00
20 0
0
0
-2 0 0
-2 0 0
0 2
5 .3
10
15
2 0
25
3 0
T e m p s [s ]
40
4 5
50
60
0
0
7
0
1 0
2 0
3 0
T e m p s [s ]
40
50
60
1 00 0
95 0
4
3
2
2
0
2
7
3
1 17 8
1 10 3
V it e s s e f ilt r é e ( t r / m )
1
1
1
1
V it e s s e f ilt r é e ( t r / m )
5 .3
1 40 0
1 32 0
10 00
9 50
0 2
8 00
7 00
6 00
4 00
80 0
Pratique
60 0
40 0
3 00
2 00
20 0
0
0
-2 0 0
-2 0 0
01 .9 4 5 .8
10
15
2 0
25
3 0
T e m p s [s ]
40
4 5
50
60
01 .9 4 5 .8
10
20
3 0
T e m p s [s ]
4 0
5 0
60
29](https://image.slidesharecdn.com/asynchrone-131130153316-phpapp02/85/Moteur-Asynchrone-29-320.jpg)
![Commande scalaire de la machine asynchrone: étude et réalisation
Régulateur retour d’état sans et avec le rejet de perturbation (RD)
Chute de vitesse
0.6 %
Simulation
Chute de vitesse Augmentation de
RD 3.5% Pratique vitesse 17.8%
COP
1010
1300
1005
1250
1000
1178
V it e s s e f ilt ré e ( t r/ m )
V it e s s e ( t r/ m )
994
990
985
980
Chute de vitesse
3.1%
975
969
965
960
20
2 0 .5
21
2 1 .5
22
2 2 .5
T e m p s [s ]
23
2 3 .5
24
2 4 .5
1103
1000
965
940
900
Augmentation de
850
25
800
10
1 5
2 02 1 . 5
2 5
Chute de vitesse
30
3 5
4 0 4 2 .7
T e m p s [s ]
50
55
vitesse 10.5%
60
6%
30](https://image.slidesharecdn.com/asynchrone-131130153316-phpapp02/85/Moteur-Asynchrone-30-320.jpg)
![Commande scalaire de la machine asynchrone: étude et réalisation
Régulateur retour d’état sans et avec le rejet de perturbation (RD)
b. Test de robustesse
Simulation
1400
1310
COP
RD
1 1 8 2 .7
1000
600
400
Très faible instabilité
1200
1000
950
V it e s s e f ilt ré e (t r/ m )
V it e s s e (t r/ m )
8 0 0 .0 9 5
Pratique
1400
1320
800
600
Test 1
400
200
200
100
100
0
0
-2 0 0
01 .9 4 5 .8
10
20
30
T e m p s [s ]
40
50
-2 0 0
60
01 .9 4 5 .8
10
20
25
30
T e m p s [s ]
40
50
60
Cas du Test 1 : Changement de vitesse de 1000 à 100 tr/min
1200
1085
1000
950
1090
1040
1000
950
800
800
V it e s s e f ilt ré e (t r/ m )
1400
1320
1 1 8 2 .7
V it e s s e (t r/ m )
1400
1310
600
400
300
Test 2
600
400
300
200
200
0
50
0
-2 0 0
-2 0 0
01 .9 4 5 .8
10
20
30
40
50
60
31
01 .9 4 5 .8
10
20
30 33
40
50
60](https://image.slidesharecdn.com/asynchrone-131130153316-phpapp02/85/Moteur-Asynchrone-31-320.jpg)
![Commande scalaire de la machine asynchrone: étude et réalisation
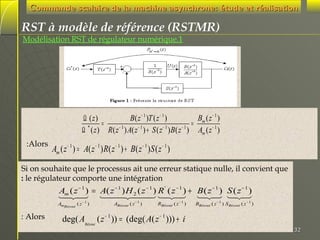
RST à modèle de référence (RSTMR)
Les résultats pratique et simulation de régulateur RSTMR.4
a. Cas de variation de vitesse et de couple
dépassement
32 %
1 4 0 0
1 3 2 0
Variation de vitesse
(tr/min 1000 ,300 ,700 ,1000)
Simulation
Variation de couple
(Cr = 0, 1.2, 0 n.m)
Pratique 1 4 0 0
de perturbation
1 3 2 0
1 2 0 0
1 0 0 0
9 5 0
1 0 0 0
9 5 0
V it e s s e ( t r / m )
1 2 0 0
V it e s s e ( t r / m )
rejet
8 0 0
7 0 0
6 0 0
4 0 0
8 0 0
6 0 0
tr=1.95 s
3 0 0
2 0 0
0
-2 0 0
4 0 0
2 0 0
0
01 .9 5
7 .4 1 0
1 5
2 0
2 5
3 0
T e m p s [s ]
4 0
4 5
5 0
-2 0 0
6 0
1 5
01 .9 5
7 .4 1 0
2 0
3 0
T e m p s [s ]
4 0
5 0
6 0
0
1 0
2 0
3 0
T e m p s [s ]
4 0
5 0
6 0
0
7 .4 1 0
2 0
3 0
T e m p s [s ]
4 0
5 0
6 0
1 5
1 0
1 0
C o u p le (N . m )
C o u p le (N . m )
7 .2
6 .2 6
3 .5
2
0
-2
-2 .9
-4 .2
7 .2
6 .2 6
1 .2
0
-9
-3 .7
-5
-1 5
-2 0
0
1 0
1 5
2 0
2 5
3 0
T e m p s [s ]
4 0
4 5
5 0
-9
-1 0
6 0
4 0
4 0
3 0
3 0
2 0
1 6 .5
1 2 .5
1 0
1 8
C o u ra n t (A )
C o u ra n t (A )
2 5
0
-1 2 .5
-1 6 .5
-2 0
1 0
3
0 .0
8
-1 0
-1 8
-2 5
-3 0
-4 0
35
-3 0
0
7 .4 1 0
1 5
1 8 2 0
2 5
2 8 3 0
T e m p s [s ]
4 0
4 5
5 0 .2
6 0
-4 0](https://image.slidesharecdn.com/asynchrone-131130153316-phpapp02/85/Moteur-Asynchrone-35-320.jpg)
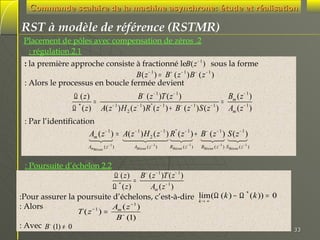
![Commande scalaire de la machine asynchrone: étude et réalisation
RST à modèle de référence (RSTMR)
Comparaison des résultats pour les régulateurs RSTMR et RD
a. Cas de variation de vitesse et de couple
Variation de vitesse
1 400
1 310
RSTMR
1 000
950
1 00 0
95 0
800
Variation de couple
1 20 0
80 0
V it e s s e (t r/ m )
1 200
V it e s s e ( t r / m )
RD
1 40 0
1 32 0
700
600
400
Simulation
60 0
40 0
300
200
20 0
0
0
-2 0 0
01 .9 4 5 .8
10
15
20
2 5
30
T e m p s [s ]
40
4 5
5 0
-2 0 0
60
01 .9 5
1 0
20
3 0
T e m p s [s ]
40
5 0
60
1400
1320
1 4 0 0
1 3 2 0
1 2 3 0
1200
1107
1000
950
V it e s s e f ilt r é e ( t r / m )
V it e s s e f ilt r é e ( t r / m )
1 0 0 0
9 5 0
8 0 0
7 0 0
6 0 0
4 0 0
3 0 0
800
Pratique
600
400
1 8 0
200
0
0
-2 0 0
01 .9 5
7 .4 1 0
1 5
2 0
2 5
3 0
T e m p s [s ]
4 0
4 5
5 0
6 0
-2 0 0
01 .9 5
7 .4 1 0
20
30
T e m p s [s ]
40
50
60
36](https://image.slidesharecdn.com/asynchrone-131130153316-phpapp02/85/Moteur-Asynchrone-36-320.jpg)
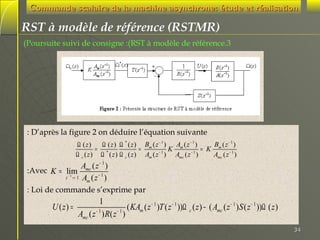
![Commande scalaire de la machine asynchrone: étude et réalisation
RST à modèle de référence (RSTMR)
Chute de vitesse
0.6 %
Chute de vitesse
RSTMR
Simulation
1010
RD %
3.8
1300
Pratique
Augmentation de
1007
1250
1000
9 9 7 .5
990
Chute de vitesse
2%
985
980
975
V it e s s e f ilt ré e (t r/ m )
1150
994
V ite s s e (t r/ m )
vitesse 10.7%
1200
1107
1050
1000
962
970
900
965
850
960
20
2 0 .5
21
2 1 .5
22
2 2 .5
T e m p s [s ]
23
2 3 .5
24
800
Augmentation de
Chute de vitesse
3.5%
2 4 .5
25
10
2 0 2 2 .8
30
vitesse 10.5%
40
43
50
60
T e m p s [s ]
37](https://image.slidesharecdn.com/asynchrone-131130153316-phpapp02/85/Moteur-Asynchrone-37-320.jpg)
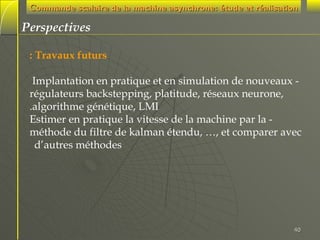
![Commande scalaire de la machine asynchrone: étude et réalisation
RST à modèle de référence (RSTMR)
b. Test de robustesse
Simulation
1400
1320
RSTMR
RD
1200
1000
Pratique
1400
1320
Très faible instabilité
1200
1000
950
V it e s s e f ilt ré e ( t r/ m )
V it e s s e (t r/ m )
800
600
330
200
100
0
800
600
Test 1
400
200
100
0
-2 0 0
-2 9 5
-4 0 0
0
10
20
30
T e m p s [s ]
40
50
-2 0 0
60
01 .9 5
7 .4 1 0
20
2628 30
T e m p s [s ]
40
50
60
Cas du Test 1 : Changement de vitesse de 1000 à 100 tr/min
1
1
1
1
4
3
2
2
0
2
7
0
1400
1320
0
0
0
0
1200
1095
800
V it e s s e f ilt ré e (t r/ m )
1000
950
800
V it e s s e (t r/ m )
1000
950
620
400
300
600
440
300
200
200
50
0
0
-9 0
-2 0 0
Test 2
38
-2 0 0
01 .9 5
10
20
30
40
50
60
01 .9 5
7 .4 1 0
20
30
40
50
60](https://image.slidesharecdn.com/asynchrone-131130153316-phpapp02/85/Moteur-Asynchrone-38-320.jpg)



Ce document présente une étude sur la commande scalaire des machines asynchrones, mettant l'accent sur l'évaluation des performances et la maîtrise des risques technologiques. Il se concentre sur la modélisation des systèmes et les différents régulateurs utilisés pour contrôler la vitesse de la machine. Les résultats expérimentaux et de simulation sont comparés pour identifier les meilleures performances en termes de temps de réponse et rejet de perturbations.






























































