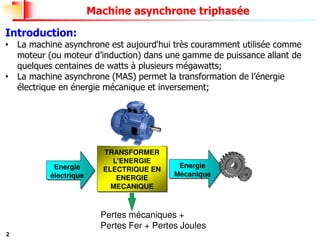
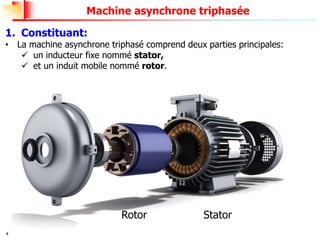
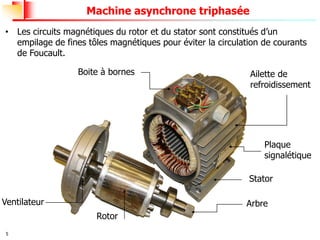
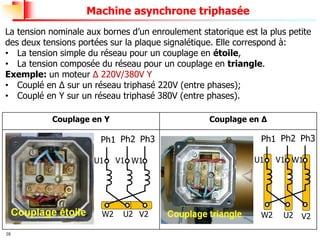
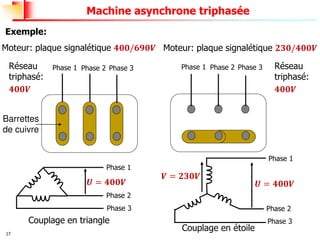
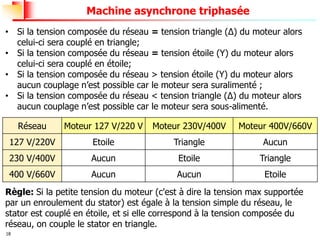
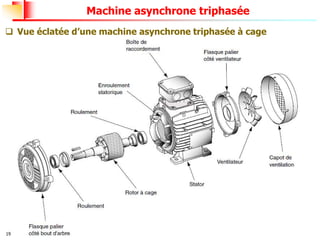
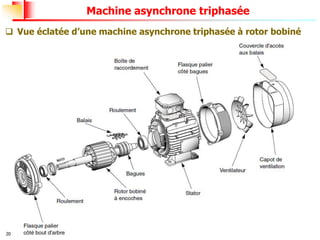
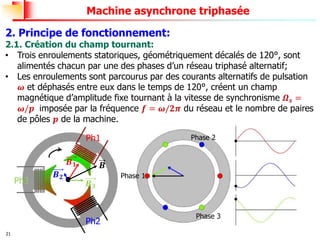
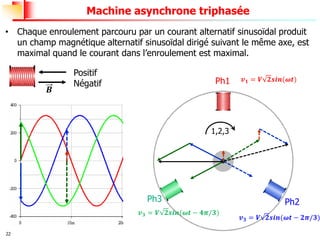
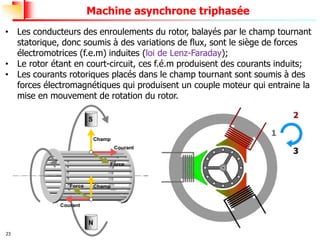
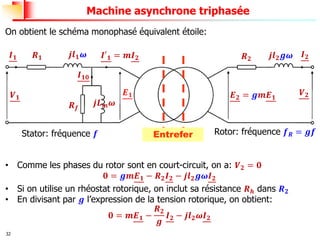
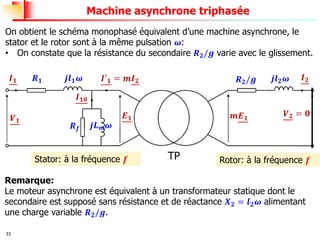
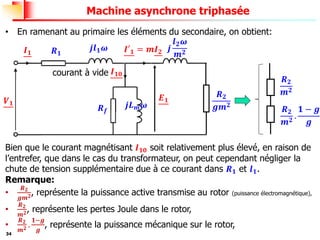
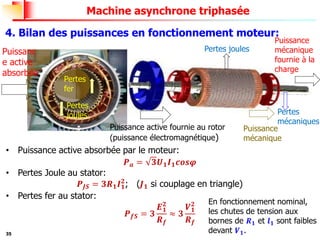
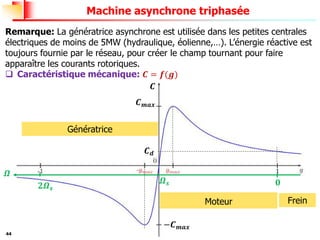
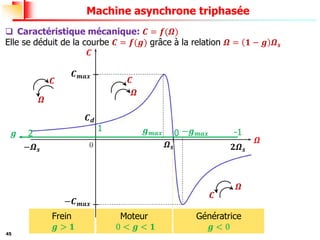
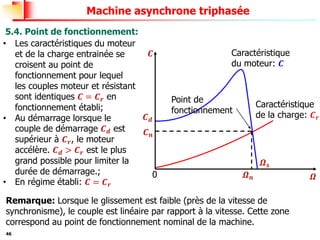
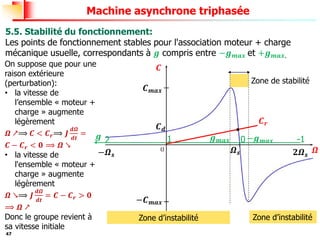
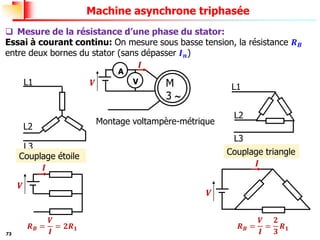
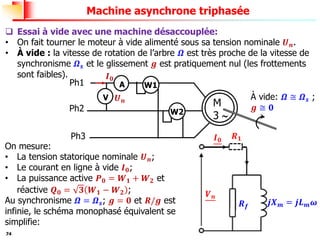
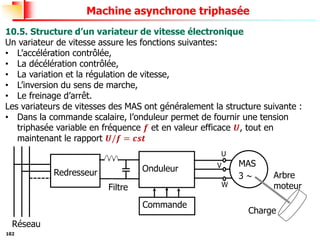
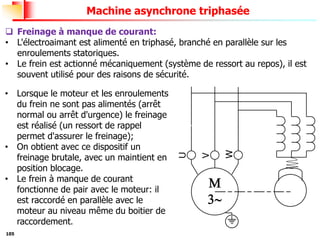
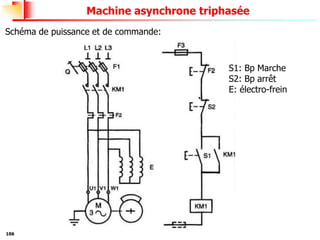
Le document traite des machines asynchrones triphasées, couramment utilisées comme moteurs dans divers domaines industriels. Il présente leur structure, avec un stator fixe et un rotor mobile, ainsi que leur fonctionnement basé sur la création d'un champ tournant qui induit des courants dans le rotor. Les notions de couplage, de glissement et de fréquence des courants rotoriques sont également abordées, mettant en avant l'importance de ces machines dans la transformation de l'énergie électrique en énergie mécanique.