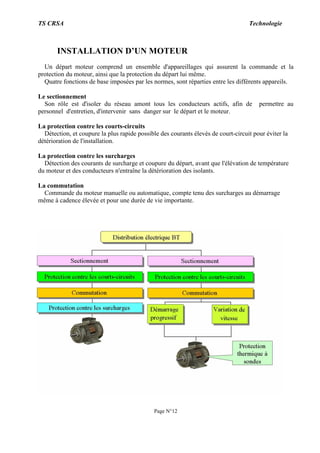
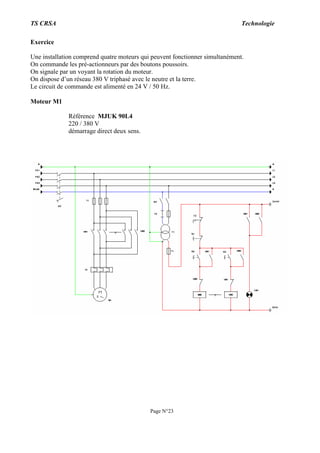
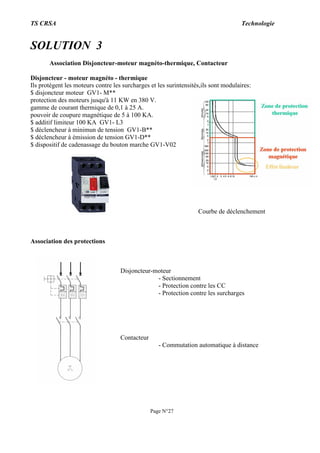
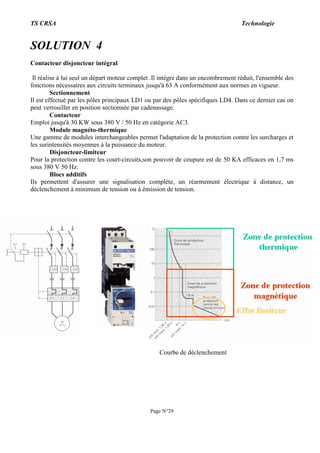
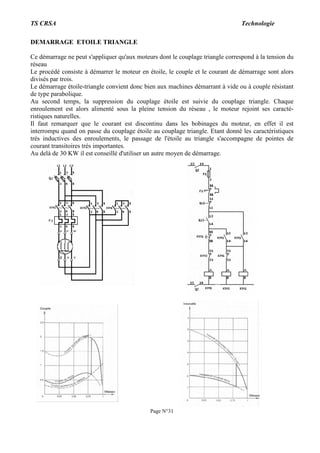
Le document traite des moteurs asynchrones triphasés, expliquant leur principe de fonctionnement, leur constitution (stator et rotor), ainsi que les méthodes de démarrage et de protection. Il décrit également les caractéristiques de construction et les points de fonctionnement, ainsi que les types de démarrage tels que direct, étoile-triangle et utilisation de démarreurs. Enfin, il aborde l'installation et la protection du moteur à travers différents dispositifs électriques, tels que relais thermiques et fusibles.


































































![[C elm][co]conversion electromecanique](https://cdn.slidesharecdn.com/ss_thumbnails/celmcoconversionelectromecanique-200227124318-thumbnail.jpg?width=640&height=640&fit=bounds)



























