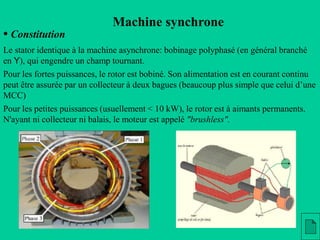
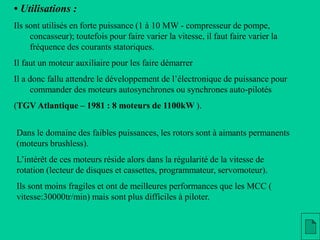
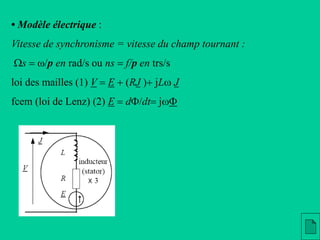
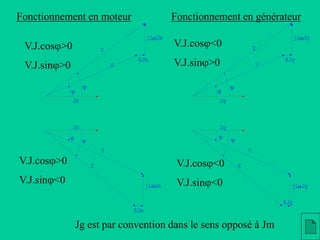
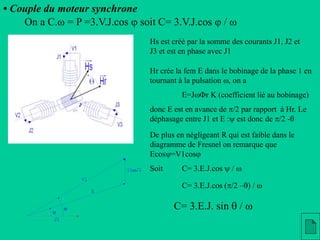
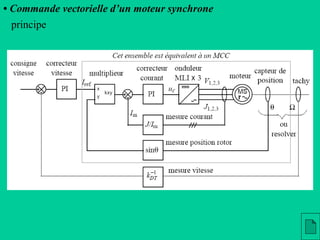
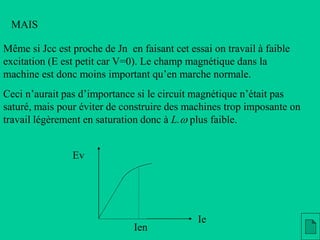
Le document examine le fonctionnement et les caractéristiques des machines synchrones, en mettant l'accent sur leur utilisation dans les applications de forte puissance et de faible puissance, comme les moteurs brushless. Il décrit les modèles électriques, le couple moteur, et les défis liés à la commande de ces machines, notamment la nécessité de maîtriser la vitesse et le couple. En outre, il aborde les méthodes de mesure et l'optimisation de l'excitation pour une operation efficace.











































![[C elm][co]conversion electromecanique](https://cdn.slidesharecdn.com/ss_thumbnails/celmcoconversionelectromecanique-200227124318-thumbnail.jpg?width=640&height=640&fit=bounds)



















![cours raspberry [Enregistrement automatique].pptx](https://cdn.slidesharecdn.com/ss_thumbnails/coursraspberryenregistrementautomatique-260206145736-b1015531-thumbnail.jpg?width=640&height=640&fit=bounds)





