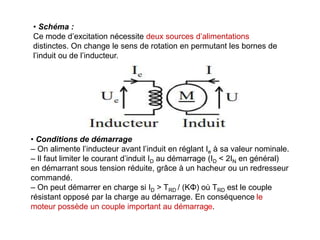
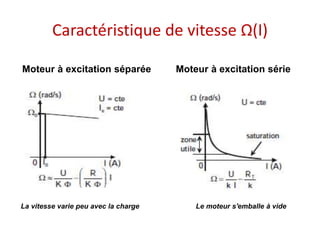
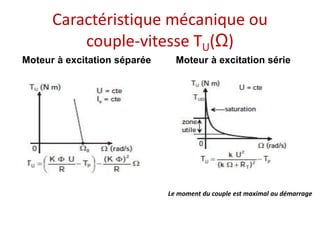
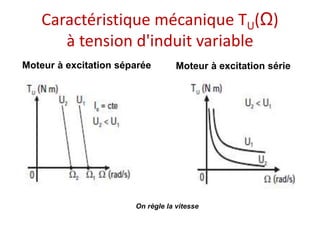
Le chapitre 3 traite des machines à courant continu, expliquant leur fonctionnement basé sur des principes de réversibilité entre génératrice et moteur. Il aborde la constitution des machines, les modes d'excitation, les caractéristiques de couple et de vitesse, ainsi que les méthodes de démarrage et de réglage. Les sections discutent également des bilans de puissance, des rendements, des mécanismes de freinage et des différents types de moteurs à excitation.





















































![[C elm][co]conversion electromecanique](https://cdn.slidesharecdn.com/ss_thumbnails/celmcoconversionelectromecanique-200227124318-thumbnail.jpg?width=640&height=640&fit=bounds)





























