Téléchargé 2 472 fois


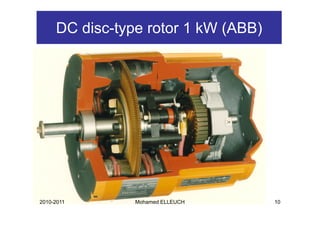


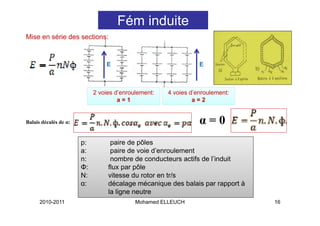
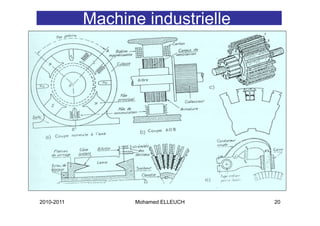
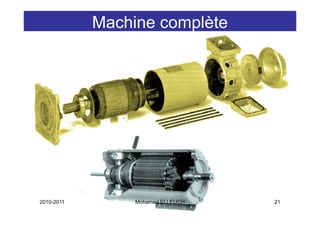
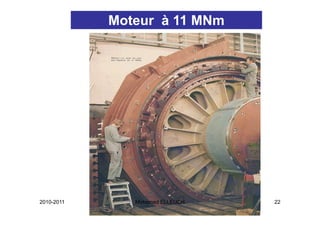

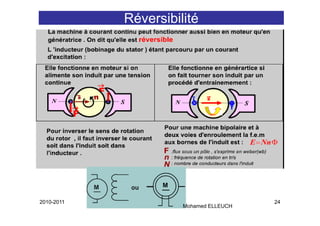
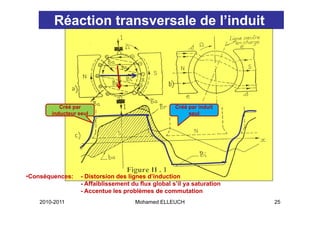
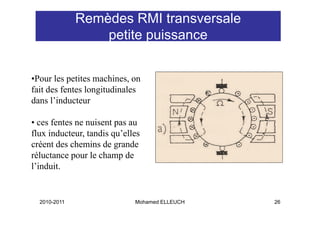
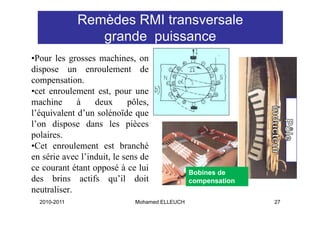
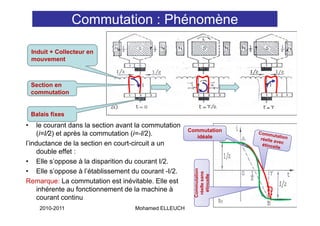

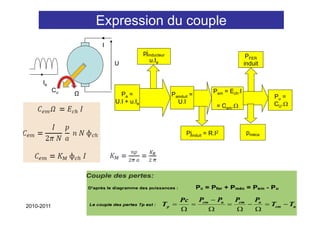
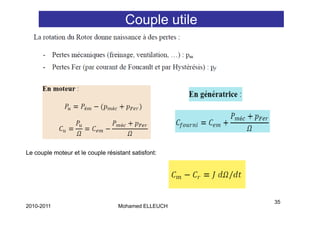
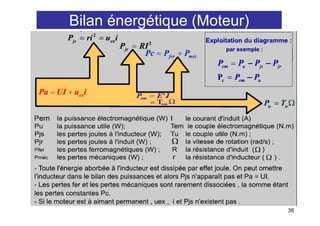
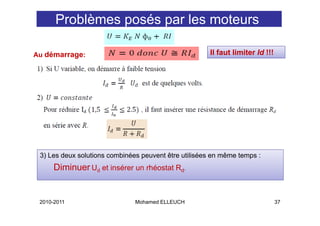
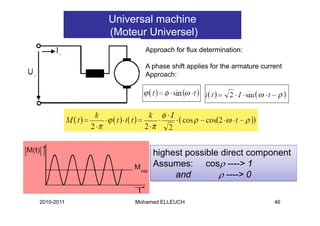
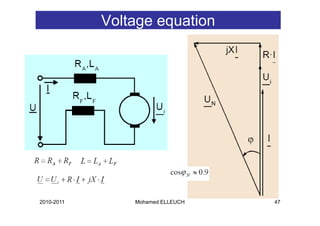
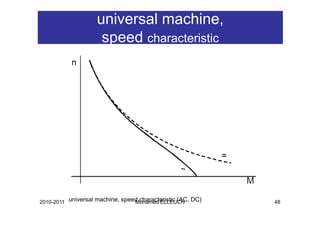
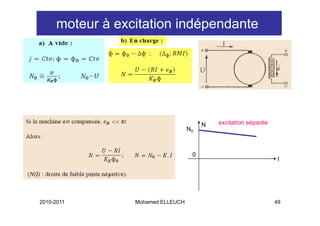
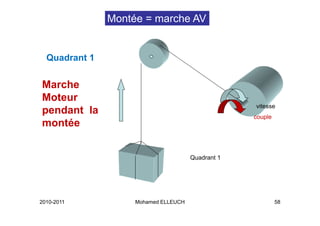
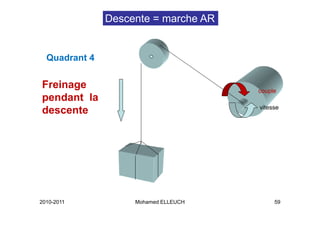

Le document traite des machines à courant continu, mettant en avant leur fonctionnement, leur utilisation dans les entraînements à vitesse variable et leur remplacement progressif par des moteurs asynchrones. Il aborde également les aspects techniques tels que les types d'excitation, le couple électromagnétique, les problèmes liés au démarrage et au freinage, ainsi que leurs applications industrielles. En conclusion, il souligne l'importance des convertisseurs électroniques pour le contrôle de ces moteurs dans divers environnements industriels.




























![[C elm][co]conversion electromecanique](https://cdn.slidesharecdn.com/ss_thumbnails/celmcoconversionelectromecanique-200227124318-thumbnail.jpg?width=640&height=640&fit=bounds)






































