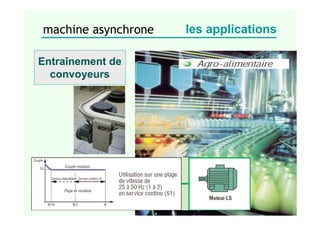
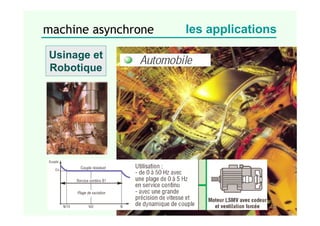
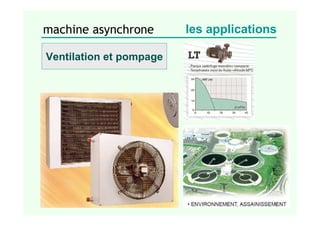
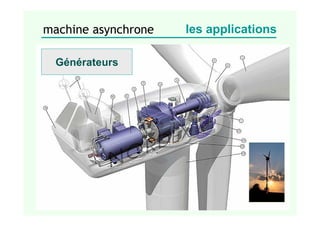
Le document traite de l'histoire et des applications des machines asynchrones, en commençant par la conception du moteur à induction biphasé par Nikola Tesla en 1883. Les machines asynchrones représentent 80 % des applications industrielles et sont essentielles dans divers domaines tels que la traction ferroviaire, l'usinage, et la robotique. Le texte examine également les techniques de contrôle et de régulation de la vitesse de ces machines, notamment à travers des variateurs électroniques et des méthodes de modulation de largeur d'impulsions.











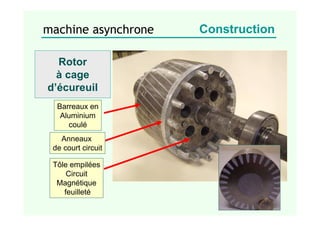
![encoches rotor
La forme des encoches et leur
profondeur, permet de modifier la
caractéristique couple (vitesse) du
moteur par effet pelliculaire ou Kelvin.
[effet de peau (skin effect)]
machine asynchrone Construction](https://image.slidesharecdn.com/masdiaporama-221125133125-affe0a6e/85/MAS_Diaporama-pdf-22-320.jpg)











































![[C elm][co]conversion electromecanique](https://cdn.slidesharecdn.com/ss_thumbnails/celmcoconversionelectromecanique-200227124318-thumbnail.jpg?width=640&height=640&fit=bounds)