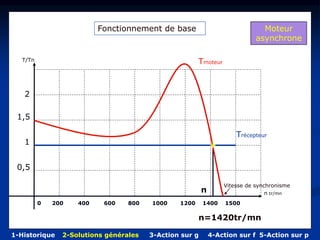
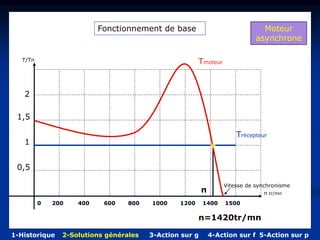
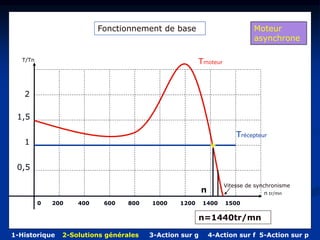
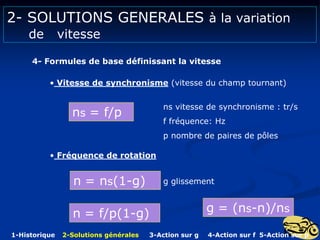
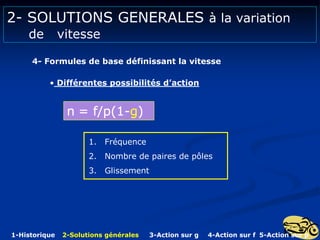
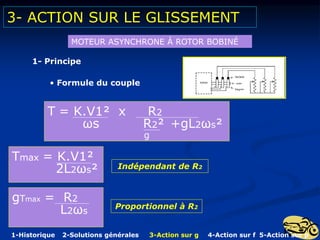
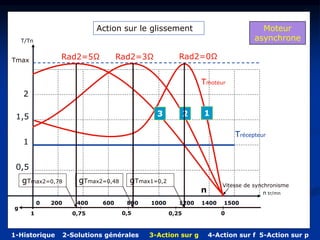
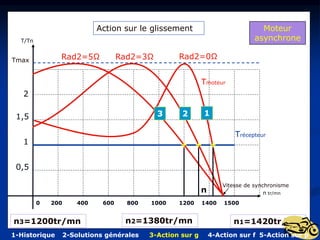
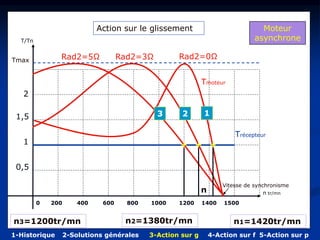
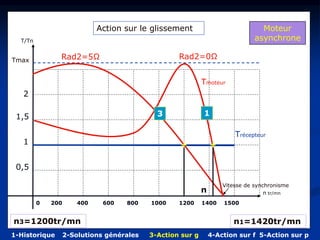
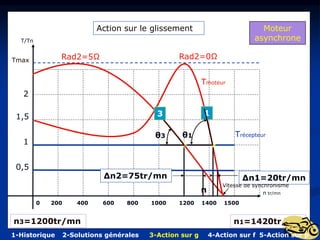
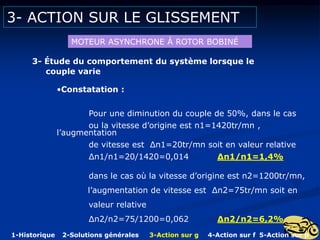
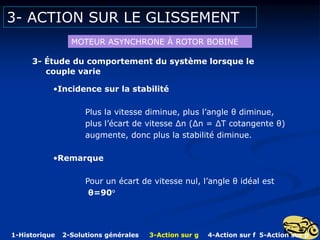
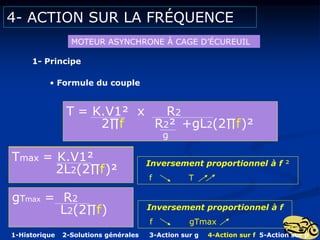
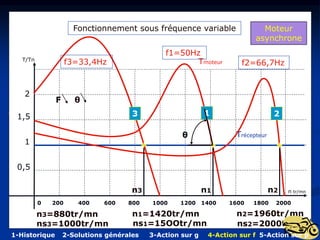
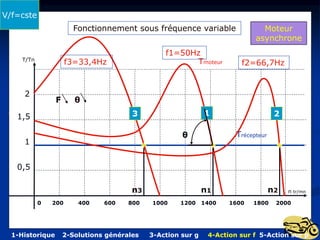
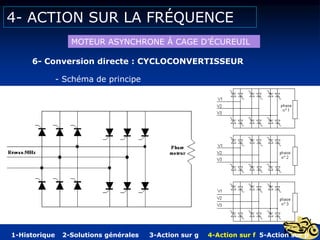
Le document traite de la variation de vitesse des moteurs asynchrones, en présentant un historique de l'évolution des systèmes de réglage de vitesse, ainsi que des solutions techniques pour contrôler cette variation via des modulateurs. Il aborde les impacts du glissement, de la fréquence et du nombre de paires de pôles sur la vitesse des moteurs, tout en discutant des formules de base qui régissent leur fonctionnement. Enfin, il met en évidence que les moteurs asynchrones maintiennent une vitesse relativement stable malgré des variations de tension d'alimentation.




























![[C elm][co]conversion electromecanique](https://cdn.slidesharecdn.com/ss_thumbnails/celmcoconversionelectromecanique-200227124318-thumbnail.jpg?width=640&height=640&fit=bounds)



