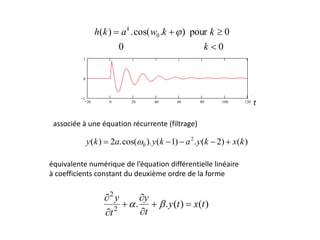
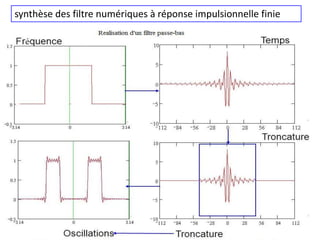
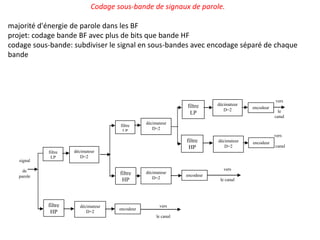
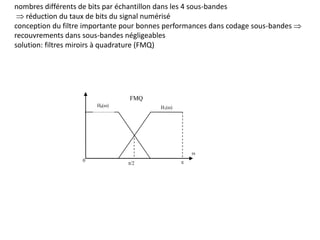
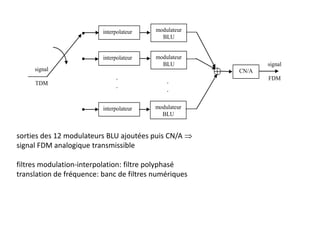
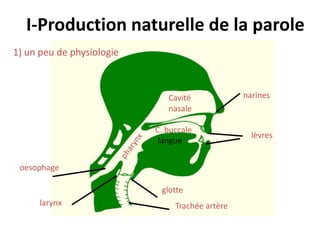
Le document traite du traitement avancé des signaux, abordant des concepts essentiels tels que les filtres numériques (RIF et RII), l'analyse spectrale paramétrique et le filtrage adaptatif, ainsi que l'analyse temps-fréquence et les processus stochastiques. Il inclut des méthodes de synthèse et des algorithmes pertinents, en plus de plusieurs transformations mathématiques telles que la transformée de Laplace et la transformée en z. Des références bibliographiques sont également fournies pour un approfondissement des sujets abordés.






![La transformée de Fourier
La transformée Fourier d’un signal y(t), est définie par :
dt
e
t
x
f
X
t
x
TF ft
j
2
)
(
)
(
)]
(
[
dt
e
t
x
e
dt
e
t
y
f
Y
t
y
TF
t
x
e
t
y
ft
j
t
ft
j
t
2
2
.
).
(
)
(
)
(
)]
(
[
)
(
)
(
La transformée de Fourier d’un signal x(t) sommable , est définie par :](https://image.slidesharecdn.com/traitement-du-signal-avance-221227020121-e1c0970a/85/traitement-du-signal-avance-pptx-8-320.jpg)
![)
(
).
(
).
(
)]
(
[
2
)
2
(
p
X
dt
e
t
x
dt
e
t
x
t
y
TF
p
f
j
pt
t
f
j
La transformée de Laplace](https://image.slidesharecdn.com/traitement-du-signal-avance-221227020121-e1c0970a/85/traitement-du-signal-avance-pptx-9-320.jpg)




![
df
e
f
j
X
df
e
e
f
j
X
t
x
df
e
f
j
X
e
t
x
f
j
X
TF
dt
e
e
t
x
dt
e
t
x
f
j
X
p
X
dt
e
t
x
dt
e
t
x
t
y
TF
p
f
j
t
f
j
ft
j
t
ft
j
t
ft
j
t
t
f
j
pt
t
f
j
)
2
(
2
2
1
2
)
2
(
)
2
(
).
2
(
).
.
.
2
.
(
)
(
).
2
(
).
(
))
2
(
(
).
(
).
(
)
2
(
)
(
).
(
).
(
)]
(
[
2
La transformée de Laplace Inverse](https://image.slidesharecdn.com/traitement-du-signal-avance-221227020121-e1c0970a/85/traitement-du-signal-avance-pptx-17-320.jpg)
![La transformée de Laplace Inverse
i
i
i
i
p
p
p
p
Y
p
p
r
]
),
(
)
lim[(
i
i
m
i
m
m
i
p
p
p
p
Y
p
p
dp
d
m
r
]
),
(
)
[(
lim
)!
1
(
1
1
1
Pole simple
Pole Multiple](https://image.slidesharecdn.com/traitement-du-signal-avance-221227020121-e1c0970a/85/traitement-du-signal-avance-pptx-20-320.jpg)



![La transformée en Z
k
pT
k
k
pkT
e
e
k
pt
pt
e
k
pt
k
e
pt
e
e
e
e
e
z
z
k
x
e
kT
x
dt
T
k
t
e
t
x
dt
e
T
k
t
t
x
dt
e
T
k
t
t
x
dt
e
t
x
t
x
TL
)
(
;
).
(
)
(
)
.
(
.
)
(
)
.
(
).
(
].
)
.
(
).[
(
)
(
)]
(
[
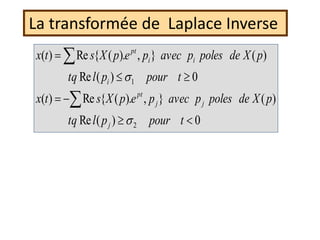
La transformée de Laplace d’un signal échantillonné xe(t) est définie par :](https://image.slidesharecdn.com/traitement-du-signal-avance-221227020121-e1c0970a/85/traitement-du-signal-avance-pptx-24-320.jpg)















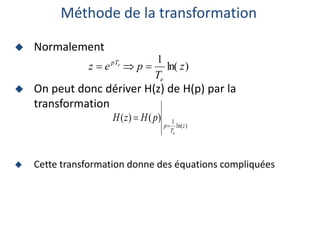
![Conversion d’un système analogique
• Méthode la plus « simple »
• Consiste à concevoir un système analogique et à le
convertir en numérique.
• Les deux méthodes les plus utilisés sont :
– L’invariance de la réponse impulsionnelle :
– La transformation :
e
kT
t
t
h
k
h
]
[
...
)
(
)
(
p
p
H
z
H](https://image.slidesharecdn.com/traitement-du-signal-avance-221227020121-e1c0970a/85/traitement-du-signal-avance-pptx-46-320.jpg)

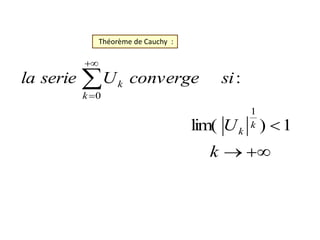
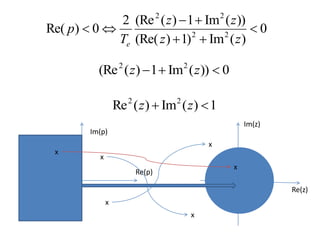
![4
1
)
(
Im
]
2
1
)
(
[Re
0
)
(
Im
4
1
4
1
)
Re(
)
(
Re
0
)
(
Im
)
Re(
)
(
Re
2
2
2
2
2
2
z
z
z
z
z
z
z
z
0
)
(
Im
)
(
Re
)
(
Im
)
Re(
)
(
Re
1
0
)
Re( 2
2
2
2
z
z
z
z
z
T
p
e
x
Im(z)
Re(z)
Im(p)
Re(p)
x
x
x
x](https://image.slidesharecdn.com/traitement-du-signal-avance-221227020121-e1c0970a/85/traitement-du-signal-avance-pptx-50-320.jpg)























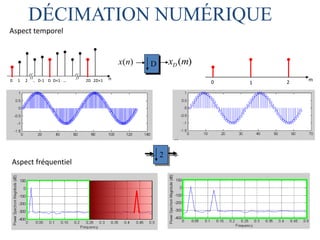

















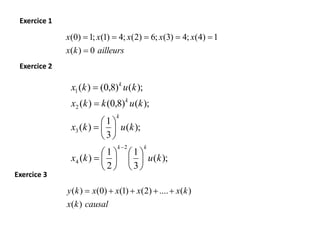
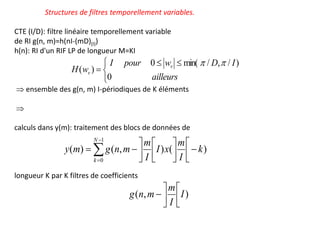
![caractéristiques des filtres polyphasés: pk(k) à partir de h(k) par décimation de I H()
plat dans 0/I
filtres polyphasés à réponse à peu près plate dans 0
filtre polyphasé: I filtres reliés à une ligne à retard
k-ème filtre: décalage avance de (k/I)Tx par rapport à ordre 0
ordre 0 à retard nul: réponse en fréquence d'ordre k pk()=exp[jk/I]
combinaison des deux méthodes sortie en décalage avant de (k+i/I)Tx par rapport
celle précédente](https://image.slidesharecdn.com/traitement-du-signal-avance-221227020121-e1c0970a/85/traitement-du-signal-avance-pptx-105-320.jpg)

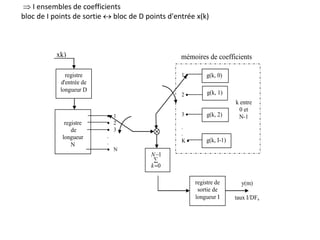

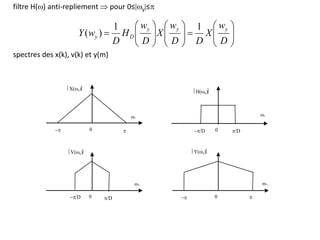
![g(K-1, l)
g(2, l)
g(1, l)
x(]mD/I-2)
x(]mD/I-K+1)
x(]mD/I-1)
x(k)
taux Fx
x(]mD/I)
y(m)
taux
(I/D)Fx
g(0, l)
z-1
l entre
0 et
I-1
D/I
z-1
z-1
D/I
D/I
D/I
autre méthode de calcul de la sortie du convertisseur de taux: filtre RIF à coefficients
périodiquement variables](https://image.slidesharecdn.com/traitement-du-signal-avance-221227020121-e1c0970a/85/traitement-du-signal-avance-pptx-110-320.jpg)
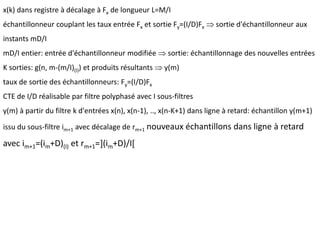












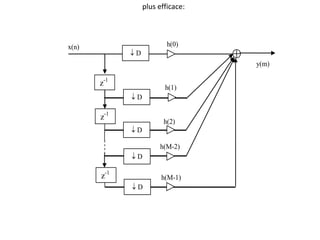
![Schéma fonctionnel du codage-décodage par quantification scalaire
Convertisseur
A/D
Quantificateur
scalaire Q
Encodage
x(t) x[k] y[k]
c[k]
Décodage
y'[k]
c'[k]](https://image.slidesharecdn.com/traitement-du-signal-avance-221227020121-e1c0970a/85/traitement-du-signal-avance-pptx-128-320.jpg)



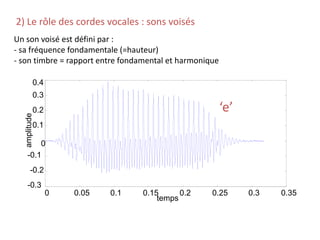

![4) Les différents types de sons (phonèmes)
Les voyelles (voisées)
Orales
Nasales
cordes
vocales
Pharynx
Cavité
buccale E
souffle
Cavité
nasale E
cordes
vocales
Pharynx
Cavité
buccale E
souffle
[A, E, I, O, U, OU...]
[IN, UN, AN, ON]](https://image.slidesharecdn.com/traitement-du-signal-avance-221227020121-e1c0970a/85/traitement-du-signal-avance-pptx-135-320.jpg)
![Les consonnes
Liquides
Nasales
cordes
vocales
Pharynx
Cavité
buccale E
souffle
Cavité
nasale E
cordes
vocales
Pharynx
Cavité
buccale E
souffle
[R,L]
[M,N,GN]](https://image.slidesharecdn.com/traitement-du-signal-avance-221227020121-e1c0970a/85/traitement-du-signal-avance-pptx-136-320.jpg)
![Fricatives non voisées
Fricatives voisées
Pharynx
Cavité
buccale E
souffle
cordes
vocales
[F, S, CH]
[V, Z, J] Pharynx
Cavité
buccale E
souffle](https://image.slidesharecdn.com/traitement-du-signal-avance-221227020121-e1c0970a/85/traitement-du-signal-avance-pptx-137-320.jpg)
![0 10 20 30 40 50 60 70 80 90 100
-0.1
-0.05
0
0.05
0.1
t (ms)
[ch]
0 1 2 3 4 5 6 7 8 9 10
-20
-10
0
10
20
30
PSD [ch]
f (kHz)
(dB)](https://image.slidesharecdn.com/traitement-du-signal-avance-221227020121-e1c0970a/85/traitement-du-signal-avance-pptx-138-320.jpg)
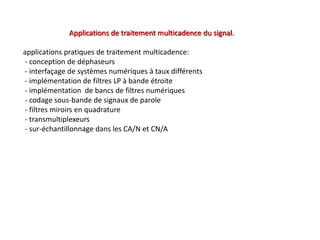
![Occlusives non voisées
Occlusives voisées
Pharynx
Cavité
buccale E
souffle
cordes
vocales
[P, T, K]
[B, D, G] Pharynx
Cavité
buccale E
souffle
Cavité
nasale E](https://image.slidesharecdn.com/traitement-du-signal-avance-221227020121-e1c0970a/85/traitement-du-signal-avance-pptx-139-320.jpg)
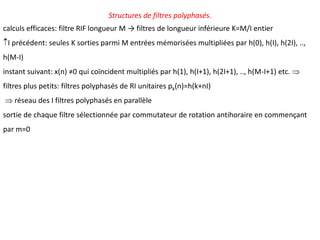
![0 50 100 150
-1
-0.5
0
0.5
1
t (ms)
[bon]
0 50 100 150
-0.1
-0.05
0
0.05
0.1
t (ms)
[par]
[p]
[on]
[r]
[b]
[a]](https://image.slidesharecdn.com/traitement-du-signal-avance-221227020121-e1c0970a/85/traitement-du-signal-avance-pptx-140-320.jpg)









![[sachez parler]
VS
-0.1 0 0.1
histogramme](https://image.slidesharecdn.com/traitement-du-signal-avance-221227020121-e1c0970a/85/traitement-du-signal-avance-pptx-152-320.jpg)
![•Rapport Signal-Bruit (RSB ou SNR)
2
2
2
log
10
d
e
x
RSB
[dB]
•facteur de charge G
G=xs/x
)
log(
20
77
.
4
02
.
6 G
b
RSB](https://image.slidesharecdn.com/traitement-du-signal-avance-221227020121-e1c0970a/85/traitement-du-signal-avance-pptx-153-320.jpg)





![7.3 Propriétes de l'analyse LPC
Filtre inverse
optimisé
x[n]
u[n]
Filtre de synthèse
s[n]
erreur de prédiction
Bruit blanc de
variance unité](https://image.slidesharecdn.com/traitement-du-signal-avance-221227020121-e1c0970a/85/traitement-du-signal-avance-pptx-161-320.jpg)








![Cours mooremealy [autosaved]](https://cdn.slidesharecdn.com/ss_thumbnails/coursmooremealyautosaved-170802082038-thumbnail.jpg?width=640&height=640&fit=bounds)






































