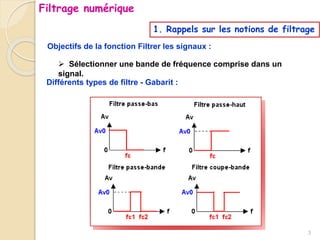
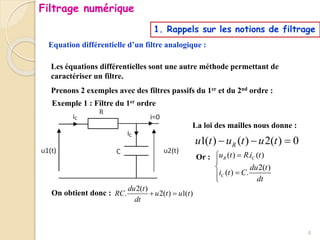
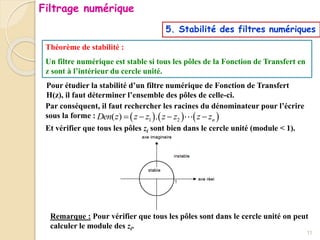
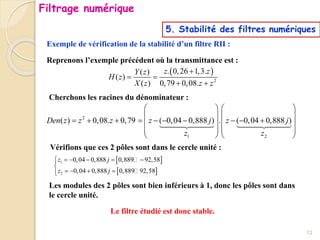
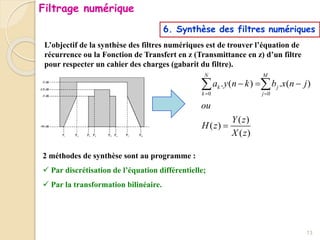
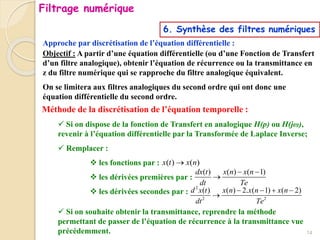
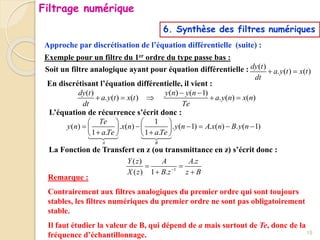
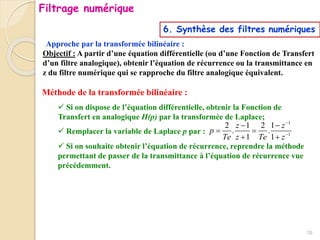
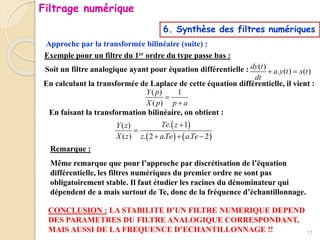
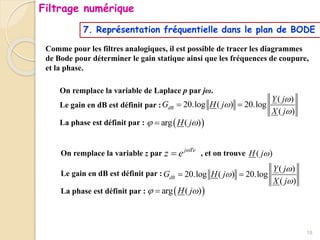
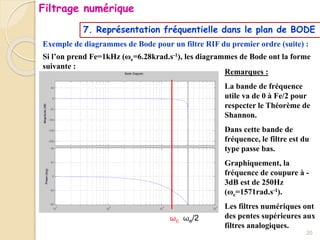
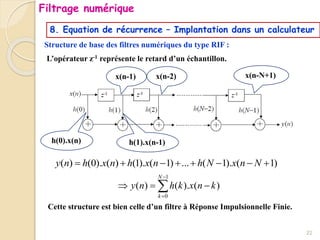
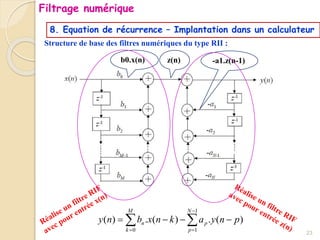
Le document traite du filtrage numérique, en abordant les concepts de base, les types de filtres et les équations différentielles associées. Il présente également les avantages et inconvénients des filtres numériques, leurs principes de fonctionnement, ainsi que des méthodes de synthèse. Enfin, il explique la stabilité des filtres numériques et inclut des exemples d'équations de récurrence.