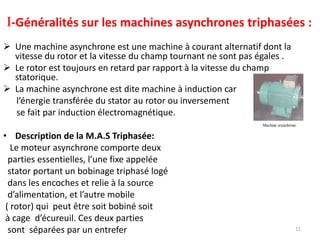
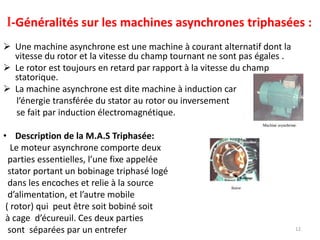
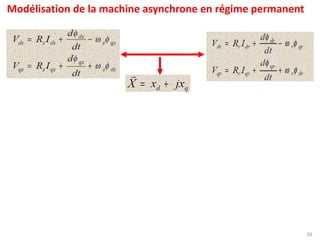
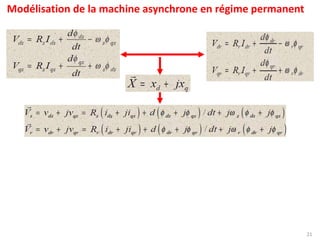
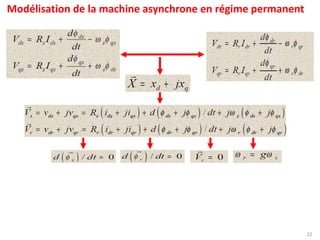
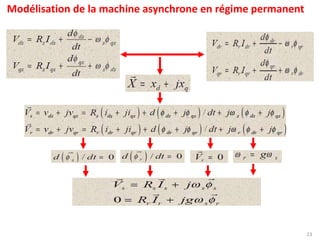
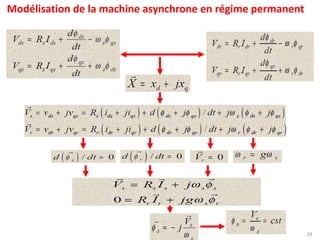
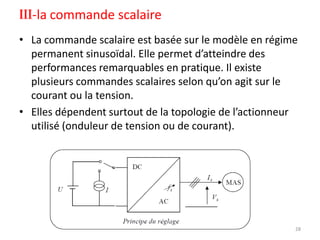
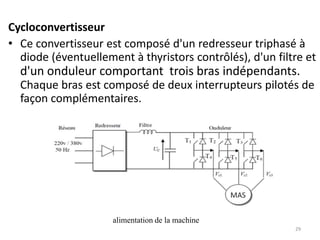
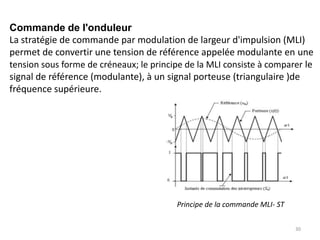
Ce document traite de la commande scalaire d'une machine asynchrone, une machine à courant alternatif dont le rotor est toujours en retard par rapport à la vitesse du champ statorique. Il aborde la modélisation, les généralités sur les machines asynchrones et les différentes stratégies de commande, notamment par modulation de largeur d'impulsion (MLI). Les simulations montrent les performances de cette commande en régime permanent et en charge.







































































![[C elm][co]conversion electromecanique](https://cdn.slidesharecdn.com/ss_thumbnails/celmcoconversionelectromecanique-200227124318-thumbnail.jpg?width=640&height=640&fit=bounds)








