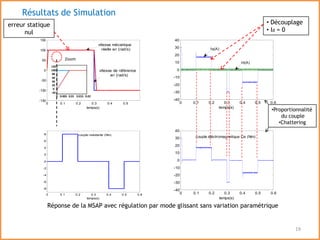
Ce mémoire présente la commande par mode glissant de la machine synchrone à aimants permanents (MSAP) et examine diverses méthodes de contrôle, y compris la commande vectorielle. Il détaille la modélisation, la simulation, et les résultats associés à l'application de la commande glissante, soulignant sa robustesse face aux perturbations. La conclusion met en avant la simplicité de mise en œuvre de cette technique, tout en notant les limites dues à l'effet de 'chattering'.















.1115](https://image.slidesharecdn.com/a-attourmgmsap-110627123832-phpapp01/85/A-ATTOU-RMG-MSAP-17-320.jpg)