Téléchargé 106 fois













![Chapitre I: Gestion de l’alimentation
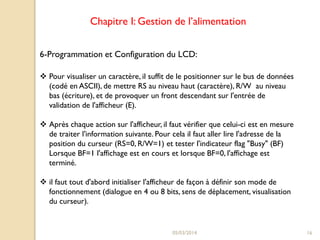
9-Différentes situation rencontrées lors de la simulation:
a-Si la tension est comprise entre [9.15 V – 9.6V] :
Pour une tension = 9.20V Niveau de
Puissance sera à 95%
Une LED Verte s’allume montrant que la
batterie est encore chargée.
05/03/2014
20](https://image.slidesharecdn.com/pptpfanidbelkacem-140305043851-phpapp01/85/Gestion-de-la-batterie-d-un-micro-drone-projet-fin-d-annee-NIDBELKACEM-Mouhcine_ppt-20-320.jpg)
![Chapitre I: Gestion de l’alimentation
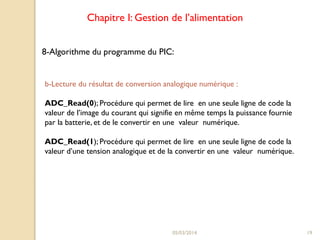
9-Différentes situation rencontrées lors de la simulation:
b-Si la tension est comprise entre [8.55 V – 915V] :
Pour une tension = 8.60V Niveau de Puissance sera à 89%
Une LED Orange s’allume montrant que la batterie est encore chargée.
c-Si la tension est inférieure à 9.15 V :
Pour une tension = 7.50V Niveau de Puissance sera à 78%
Une LED Rouge s’allume montrant que la batterie a atteint le
niveau critique et il faut la recharger.
05/03/2014
21](https://image.slidesharecdn.com/pptpfanidbelkacem-140305043851-phpapp01/85/Gestion-de-la-batterie-d-un-micro-drone-projet-fin-d-annee-NIDBELKACEM-Mouhcine_ppt-21-320.jpg)








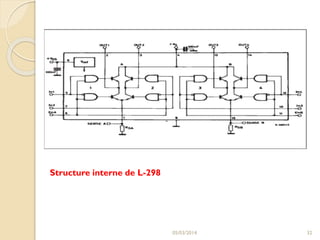

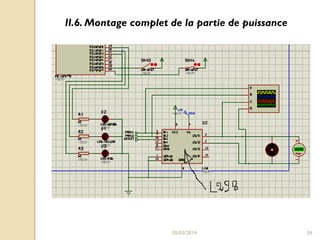
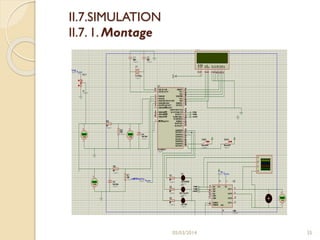



Ce document détaille la conception et la réalisation des interfaces de puissance et de gestion de l'alimentation d'un micro-drone, en abordant des aspects tels que le dimensionnement de la batterie, le choix des composants et la programmation des systèmes de contrôle. Les chapitres décrivent également le fonctionnement des moteurs électriques et la modulation de la puissance, tout en offrant des solutions de simulation pour le contrôle des performances. En conclusion, le document fournit une vue d'ensemble de la méthodologie et des défis rencontrés durant le processus de développement.



































































