Téléchargé 50 fois



![Rapport de fin d’année
6
Chapitre I : ALIMENTATION EN PUISSANCE D’UN MICRODRONE
I. DIMENSIONNEMENT DE LA BATTERIE DU MICRO DRONE
Il est recommandé de déterminer les caractéristiques chimiques et électriques de la batterie qui va servir comme alimentation du Quadri rotor.
I.1. Définition de la Technologie
Fig.1 Accumulateur NiMH
I.2. La Charge
Il est recommandé en pratique d'utiliser un chargeur qui détecte automatiquement la fin de charge. Pour les chargeurs non équipés de détection de température, la détection n'est fiable que pour une charge rapide, soit de l'ordre de C/1h ou même de C/15min [8] .
Les caractéristiques d’un chargeur sont :
1. Temps de charge (rapide t < 1 h, normal 14 h ou combiné).
2. Détection de fin de charge par (δv/δt) < 0, ou par le point d'inflexion (δ²v/δt²) = 0 (valable uniquement pour les charges rapides).
3. Surveillance de la température de l'accumulateur.
4. Temporisation de sécurité.
5. Détection des accumulateurs défectueux.
6. Cycle de décharge puis de charge.
Lors de la conception de notre projet nous avons choisi de travailler avec la technologie du Nickel-hydrure métallique ou NiMH qui représente un type d’accumulateur électrique rechargeable utilisant l’hydrure métallique [8] .](https://image.slidesharecdn.com/rapportpfanidbelkacem-140305043828-phpapp01-140930190146-phpapp02/85/Rapportpfanidbelkacem-140305043828-phpapp01-6-320.jpg)
![Rapport de fin d’année
8
I.6. Puissance consommée Tout d’abord il faut savoir les puissances maximales consommées par chaque équipement du micro drone à savoir qu’on va utiliser 4 batteries en parallèle ce qui veut dire que la tension nominale reste la même : Un=9.6V Alors que le courant nominal résultant sera égal bien évidemment à : In = 4*1.35 = 5.4 A On en déduit : Puissances absorbées par les moteurs= (5V.1A).4=20W Puissances absorbées par les autres équipements =1.4A.5V=7W II. CARTE D’ADAPTATION DE LE LA TENSION II.1. Choix d’un PIC : le 16F877
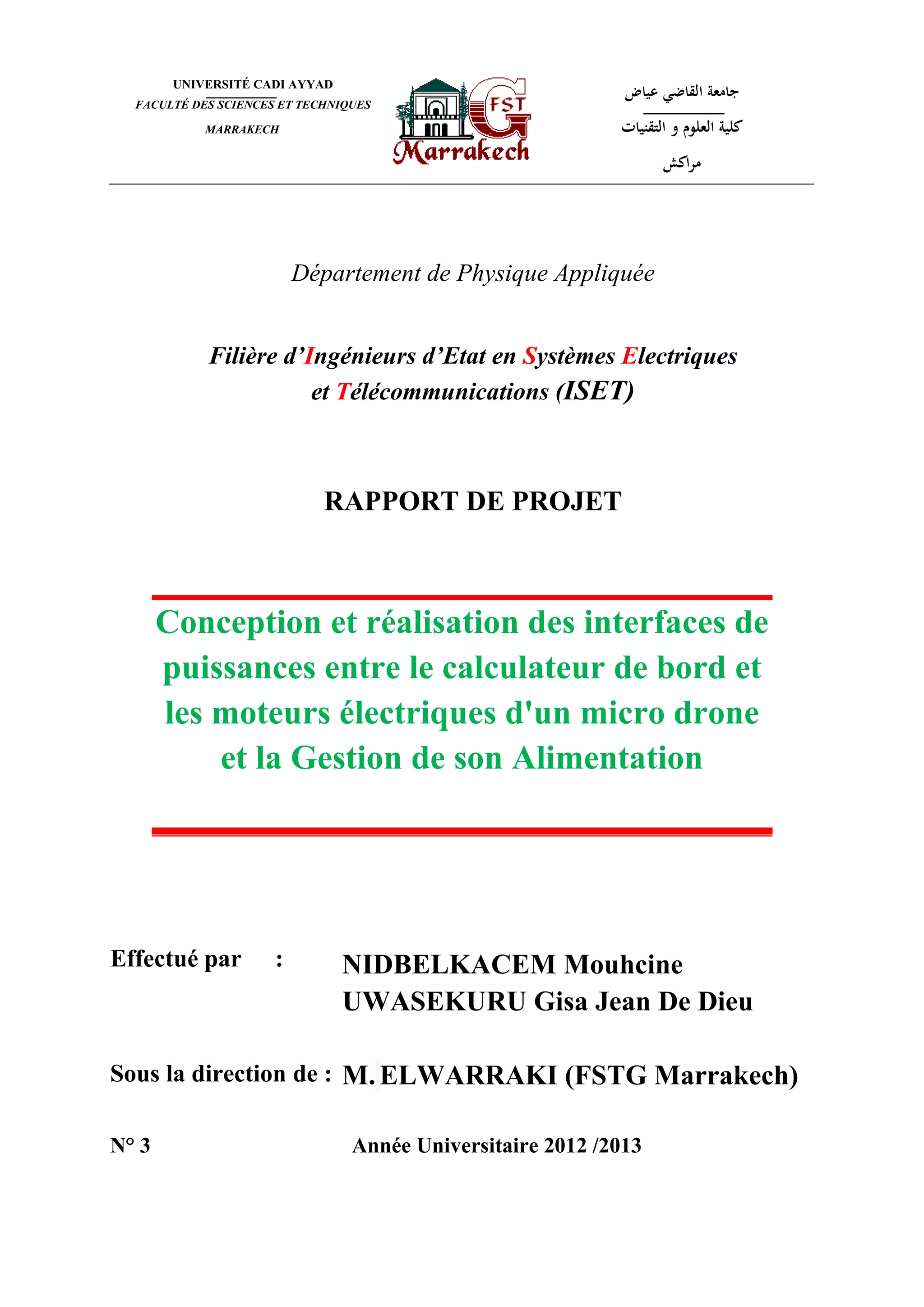
Dans notre projet nous avons choisi de travailler avec le PIC16F877A c’est un type de microcontrôleur de la série « Midrange », qui se prête particulièrement bien à la programmation en C. Les PIC de la série inférieure sont un peu justes en performance et en capacité mémoire pour accueillir un programme issu d’un compilateur C ; mieux vaut les programmer en assembleur. Les gammes supérieures (16 ou 32 bits) supportent sans problème la programmation en C, mais comme ils sont des circuits plus complexes (et plus chers), Le 16F877 (F comme « Flash ») semble le meilleur pour notre projet en terme de : mémoire programme de taille suffisante (8K), nombreux périphériques intégrés et fréquence de fonctionnement jusqu’à 20 MHz. Le brochage du pic16F877 est représenté sur la figure 2 [3].
Fig.2.Brochage du PIC16F877](https://image.slidesharecdn.com/rapportpfanidbelkacem-140305043828-phpapp01-140930190146-phpapp02/85/Rapportpfanidbelkacem-140305043828-phpapp01-8-320.jpg)

![Rapport de fin d’année
10
Cette solution est établie sur 3 étapes
II.3. Programmation et configuration de l’ADC Pour programmer l’ADC, il est nécessaire de passer par les 5 étapes suivantes (A, B, C, D, E) [10]:
II.4. Programmation et Configuration du LCD
Pour visualiser un caractère, il suffit de le positionner sur le bus de données (codé en ASCII), de mettre RS au niveau haut (caractère), R/W au niveau bas (écriture), et de provoquer un front descendant sur l'entrée de validation de l'afficheur (E).
Après chaque action sur l'afficheur, il faut vérifier que celui-ci est en mesure de traiter l'information suivante. Pour cela il faut aller lire l'adresse de la position du curseur (RS=0,](https://image.slidesharecdn.com/rapportpfanidbelkacem-140305043828-phpapp01-140930190146-phpapp02/85/Rapportpfanidbelkacem-140305043828-phpapp01-10-320.jpg)
![Rapport de fin d’année
11
R/W=1) et tester l'indicateur flag "Busy" (BF). Lorsque BF=1 l'affichage est en cours et lorsque BF=0, l'affichage est terminé.
Si l'on tente d'écrire des données ou d'envoyer une commande à l'afficheur pendant que ce dernier est en cours de traitement des données ou d'une commande précédente, le système peut se planter, l'affichage s'affole et les deux circuits intégrés voient leurs températures entrain de s’augmenter brutalement.
Avant cette procédure d'écriture, il faut tout d'abord initialiser l'afficheur de façon à définir son mode de fonctionnement (dialogue en 4 ou 8 bits, sens de déplacement, visualisation du curseur) [10].
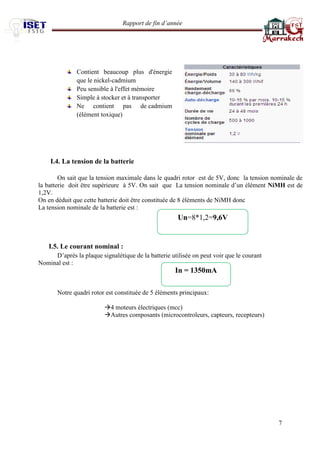
II.5. Montage final et solution retenue
L'entrée AN1 du PIC reçoit la tension de la batterie, atténuée avec un rapport de 0.5208 par le pont diviseur constitué de R4 et R5, ce qui signifie qu'une tension de la batterie de 9.6V se traduit par une tension mesurée de 5V.
L’entrée AN0 reçoit l’image du courant converti en tension à travers une résistance.
Nous avons utilisé deux diodes Zener (D4) et (D5) de 5V crête pour tout dépassement qui pourrait se produire pour diverses raisons (surtension ou une surintensité).
Pour la partie Affichage, le LCD est lié avec le PORTB, les 3 LEDs sont directement liées aux 3 bornes (RD0-RD1-RD2) du PORTD. Le PORTC sera dédié pour générer les signaux PWM, RD6 et RD7 seront configurés comme entrées commandés par 2 Switch pour faire tourner le moteur dans les 2 sens.
Fig.4 Montage de la simulation finale, partie alimentation](https://image.slidesharecdn.com/rapportpfanidbelkacem-140305043828-phpapp01-140930190146-phpapp02/85/Rapportpfanidbelkacem-140305043828-phpapp01-11-320.jpg)
![Rapport de fin d’année
12
II.6. Algorithme du programme du Pic
Les différentes fonctions dont on aura besoin dans le programme principal (Voir Annexe) sont les suivantes :
Affichage sur LCD :
Lcd_Init(); Initiation du LCD
Lcd_Cmd(_LCD_CLEAR); Effacement du LCD
Lcd_Cmd(_LCD_CURSOR_OFF);Déplacement du curseur
Lecture du résultat de conversion analogique numérique :
ADC_Read(0); Procédure qui permet de lire en une seule ligne de code la valeur de l’image du courant qui signifie en même temps la puissance fournie par la batterie, et de le convertir en une valeur numérique.
ADC_Read(1); Procédure qui permet de lire en une seule ligne de code la valeur d’une tension analogique et de la convertir en une valeur numérique.
II.7. Différentes Situations Rencontrées lors de la Simulation :
Dans la pratique la grandeur qui varie lors de l’utilisation d’une batterie c’est sa capacité et vu que dans la simulation sur ISIS on ne peut agir que sur la tension de la batterie variant entre [0V – 9.6V] donc on essayer de varier cette tension afin de vérifier notre programme et d’une part, et d’autre part de voir les différents cas possibles :
Si la tension est comprise entre [9.15 V – 9.6V]
Pour une tension = 9.20V Niveau de Puissance sera à 95%
Une LED Verte s’allume montrant que la batterie est encore chargée.
Fig.5 Batterie chargée](https://image.slidesharecdn.com/rapportpfanidbelkacem-140305043828-phpapp01-140930190146-phpapp02/85/Rapportpfanidbelkacem-140305043828-phpapp01-12-320.jpg)
![Rapport de fin d’année
13
Si la tension est comprise entre [8.55 V – 9.15V]
Pour une tension = 8.60V Niveau de Puissance sera à 89%
Une LED Orange s’allume montrant que la batterie est encore chargée.
Fig.6 Etat intermédiaire
Si la tension est inférieure à 9.15 V :
Pour une tension = 7.50V Niveau de Puissance sera à 78%
Une LED Rouge s’allume montrant que la batterie a atteint le niveau critique et il faut la recharger.
Fig.7 Etat critique de la batterie](https://image.slidesharecdn.com/rapportpfanidbelkacem-140305043828-phpapp01-140930190146-phpapp02/85/Rapportpfanidbelkacem-140305043828-phpapp01-13-320.jpg)
![Rapport de fin d’année
14
Chapitre II : CONCEPTION ET REALISATION DES INTERFACES DE PUISSANCES ENTRE LE CALCULATEUR DE BORD ET LE MOTEUR ELECTRIQUE
I. INTRODUCTION
Cette deuxième partie de notre projet consiste à concevoir et à réaliser les interfaces de puissances entre le calculateur de bord et le moteur électrique. Pour cela, nous allons réaliser un variateur de vitesse pour le moteur à courant continu basé sur le principe de la modulation de largeur d’impulsion MLI dite aussi PWM (pulse width modulation) et commandé par un microcontrôleur PIC16F877.
II. PRINCIPE
Pour faire varier la vitesse d'un moteur à courant continu, on peut faire varier la tension d'alimentation à ses bornes mais dans ce cas une partie importante de l'énergie est consommée par le dispositif d’alimentation. C’est pourquoi nous préférons d'alimenter de façon discontinue avec un hacheur , un circuit de puissance permettant non seulement de convertir une tension continue en une tension continue variable mais aussi de l’amplifier selon l’application, et faire ainsi varier la tension moyenne à ses bornes. On parle alors de Modulation par Largeur d'impulsions (MLI).
III. ETUDE DE L’HACHEUR
III.1. Définition
Un hacheur peut être réalisé à l’aide d’interrupteurs électroniques commandables à l’ouverture et à la fermeture tels que les thyristors GTO ou les transistors bipolaires ou à effet de champs à grille isolée [9].
Fig. 8: Symbole de l’hacheur
III.2. Les types de l’hacheur
III.2.1. Hacheur « dévolteur » ou hacheur « série »
Il est appelé hacheur série car l’élément commandé est placé en série avec la source.
Le schéma de principe d’un hacheur « abaisseur de tension » ou « dévolteur » est représenté dans la figure 2
H est un interrupteur commandé et D une diode qui permet de transférer de la puissance de la source à la charge [1].](https://image.slidesharecdn.com/rapportpfanidbelkacem-140305043828-phpapp01-140930190146-phpapp02/85/Rapportpfanidbelkacem-140305043828-phpapp01-14-320.jpg)

![Rapport de fin d’année
16
Le schéma de principe d’un hacheur « élévateur de tension » ou « survolteur » est représente dans la figure 12.
.
Fig. 12 : Schéma de principe du survolteur.
On obtient pour la tension aux bornes de la source le chronogramme suivant :
Fig. 13 : Chronogramme de Uc (survolteur)
Ce qui donne pour la valeur moyenne Uc: Uc=<Us>/ α)
Donc l’hacheur parallèle est bien un élévateur de tension « survolteur ».
Il existe bien évidement d’autres types de hacheur comme le hacheur survolteur- dévolteur...
III.3. Technologie des interrupteurs
Les « interrupteurs » que l’on rencontre dans l’hacheur sont des semi-conducteurs utilisés en régime de commutation. L’état de l’interrupteur, fermé ou ouvert, peut souvent être commandé grâce à un signal adéquat appliqué à une électrode de commande.
La conduction est le plus souvent unidirectionnelle, c'est-à-dire que l’interrupteur ne peut laisser passer le courant que dans un seul sens (sous peine de détérioration du composant).Ils peuvent être des transistors bipolaires, des MOSFET, des IGBT ou des thyristors….[9].](https://image.slidesharecdn.com/rapportpfanidbelkacem-140305043828-phpapp01-140930190146-phpapp02/85/Rapportpfanidbelkacem-140305043828-phpapp01-16-320.jpg)
![Rapport de fin d’année
17
IV. HACHEUR QUATRE QUADRANTS
IV.1. Fonctionnement quatre quadrants
Nous allons étudier un convertisseur qui assure non seulement la réversibilité en courant, mais également la réversibilité en tension. Il s’agit alors de définir une structure qui permet de travailler dans les quatre quadrants. Voir figure 14 [9].
Fig.14. Fonctionnement quatre quadrants
IV.2. La carte de puissance.
La carte de puissance joue le rôle d'une carte d'interface entre la carte de commande (le microcontrôleur) et la partie motrice (le moteur) comportant des composants mécaniques, elle nous permet de commander les moteurs à courant continu suivant les ordres fournis par la carte de commande.
Notre carte de puissance est composée de quatre ponts en H, ce dernier est constitué de quatre transistors qui travaillent comme des interrupteurs et permettent d'obtenir quatre états selon la façon dont ils sont commandés, ce principe est représenté par la figure 15 [8].
Fig. 15: Fonctionnement d’un Pont H.
Cas 1: La roue est libre, tous les interrupteurs sont commandés ouverts (T1, T2, T3 et T4 ouverts), aucune tension n'est appliquée au moteur : il est déconnecté.](https://image.slidesharecdn.com/rapportpfanidbelkacem-140305043828-phpapp01-140930190146-phpapp02/85/Rapportpfanidbelkacem-140305043828-phpapp01-17-320.jpg)
![Rapport de fin d’année
18
Cas 2: La marche avant(Sens1), deux interrupteurs sont commandés fermés et deux autres ouverts (T1 et T4 fermés et T2 et T3 ouvert), on applique au moteur la tension de la batterie.
Cas 3: La marche arrière(Sens2), deux interrupteurs sont commandés fermés et deux autres ouverts (T2 et T3 fermés et T1 et T4 ouverts), mais, à l'inverse du cas précédent, on applique au moteur la tension de la batterie, avec une polarité inverse.
Cas 4 : Le frein, deux interrupteurs de la même polarité du pont en H sont commandés fermés (T1, T2, T3 et T4), les pôles du moteur sont court-circuités, ce qui freine le moteur. Cet état est rarement utilisé. (Cas non représenté sur la figure).
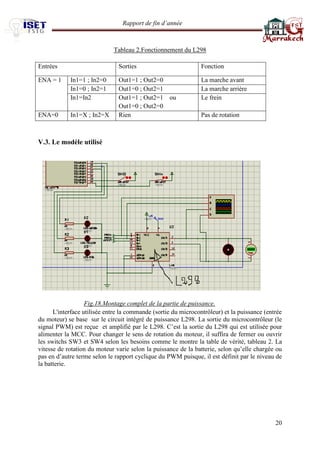
Un pont en H est donc simplement un interrupteur qui relie la batterie au moteur. Cet interrupteur est généralement commandé par deux entrées logiques : In1 et In2. Tableau.1.Logique décrivant le fonctionnement du pont en H In1 In2
Moteur
0
0 Arrêt
0
1 Sens1
1
0 Sens2
1
1 Arrêt
Dans ce projet, nous ne connectons pas directement le moteur à l’alimentation via le Pont H car cela provoquerait d’une part une consommation importante de l’énergie, d’autre part le Pont H constitué généralement de quatre transistors de rapport cyclique différent, ceci provoque un retard du signal de sortie. C’est ainsi que l’utilisation du circuit de puissance intégrant deux Pont H de même rapport cyclique et qui amplifie le signal d’entrée semble le plus convenable pour notre projet.
V. ETAGE DE PUISSANCE
V.1.Définition
L’étage de puissance (driver) utilisé est un circuit intégré L298 pour les moteurs à courant continu. Ce circuit offre un double pont en H pour former une interface avec microcontrôleur.
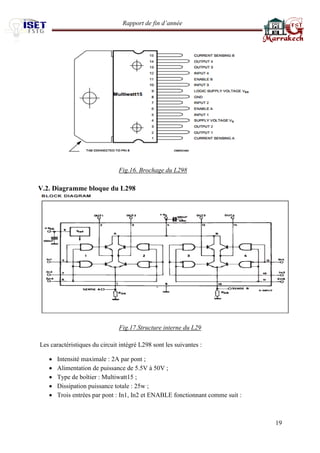
Le L298N se décline dans un boîtier Multi watt à 15 pins schématisé dans la figure 17 [6]](https://image.slidesharecdn.com/rapportpfanidbelkacem-140305043828-phpapp01-140930190146-phpapp02/85/Rapportpfanidbelkacem-140305043828-phpapp01-18-320.jpg)






![Rapport de fin d’année
27
LA BIBLIOGRAPHIE
Les livres consultés :
[1]. Luc LASNE : Professeur agrégé à l’Université de Bordeaux 1, DUNOD. Rappel de cours, exercices et problèmes d’électrotechnique.
[2] Christophe François : Professeur agrégé de génie électrique en TS1 et TS2 au lycée Louis Rascol d’Albi, Ingénieur de l’Ecole Supérieure de l’électricité et de l’Ecole Centrale de Nantes.
Liens :
[3] www.technologuepro.com
[4] www.technologuepro.com/montages-electroniques/variateur-vitesse-moteur-16.html
[5]www.memoireonline.com/10/08/1600/m_mise-en-oeuvre-partie-perception-d-un- robot9.html
[6] www.robosapiensindia.com/resources/L298.pdf
www.robot-maker.com/index.php/blog/11/entry-11-schema-de-principe-de-la-carte-de- puissance/
[7] fr.farnell.com/national-semiconductor/lmd18200t/pont-3a-55v/dp/9488030
[8] fr.wikipedia.org/wiki/Pont_en_H
Anciens rapports :
[9] Conception et réalisation des interfaces de puissances entre le calculateur de bord et les moteurs électriques d'un micro drone.
[10] Réalisation et gestion de l’alimentation du micro drone.](https://image.slidesharecdn.com/rapportpfanidbelkacem-140305043828-phpapp01-140930190146-phpapp02/85/Rapportpfanidbelkacem-140305043828-phpapp01-27-320.jpg)



Ce document est un rapport de projet sur la conception et la réalisation des interfaces de puissance pour un micro-drone, abordant la gestion de son alimentation et l'interface entre le calculateur et les moteurs électriques. Le rapport s'articule autour de trois parties principales : l'alimentation de la batterie, les cartes d'adaptation de tension, et la conception des interfaces de puissance. Les auteurs, encadrés par M. Elwarraki, montrent le processus de dimensionnement de la batterie et la mise en œuvre des dispositifs pour contrôler et varier la puissance fournie aux moteurs.






![[C elm][co]conversion electromecanique](https://cdn.slidesharecdn.com/ss_thumbnails/celmcoconversionelectromecanique-200227124318-thumbnail.jpg?width=640&height=640&fit=bounds)










































































