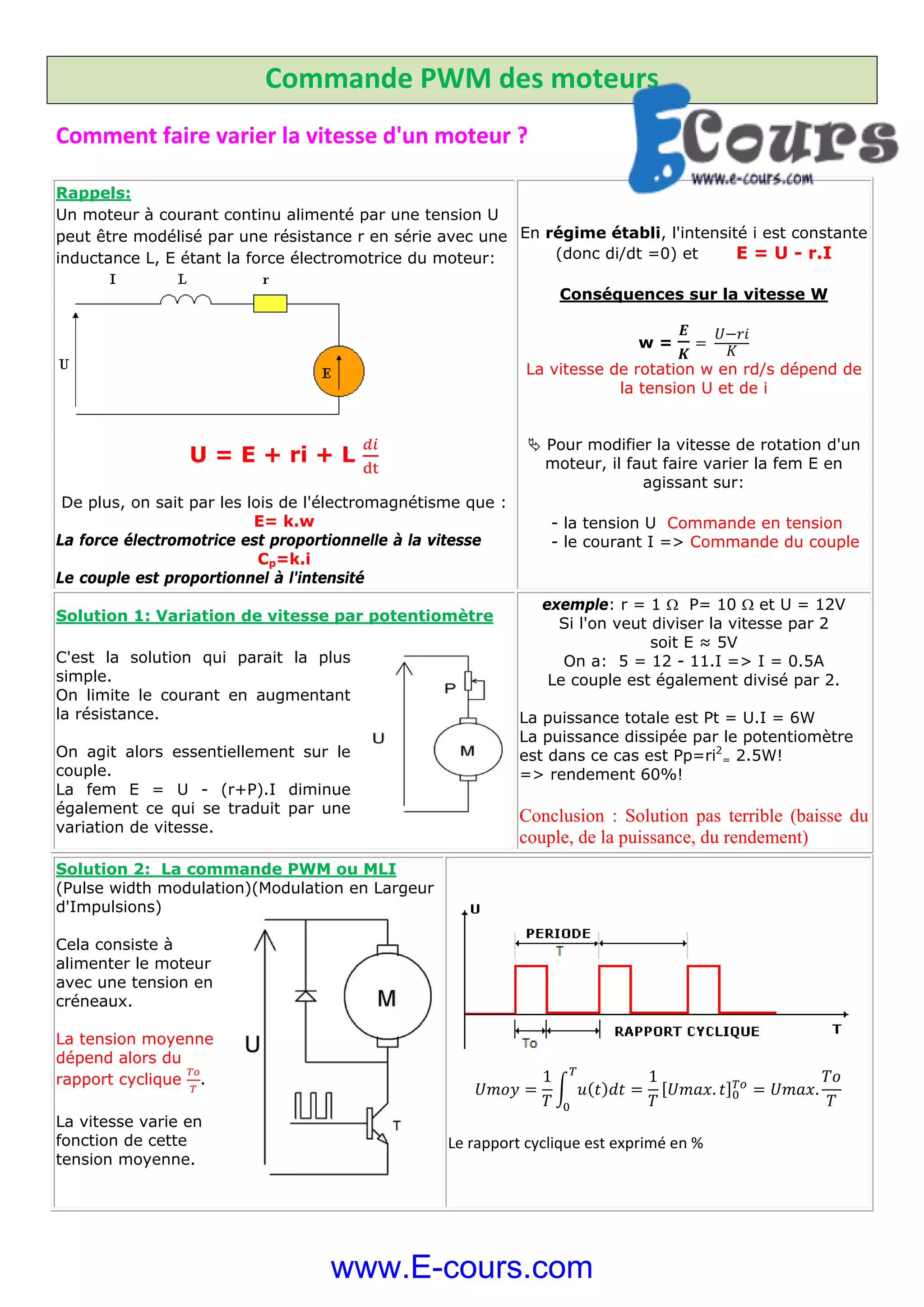
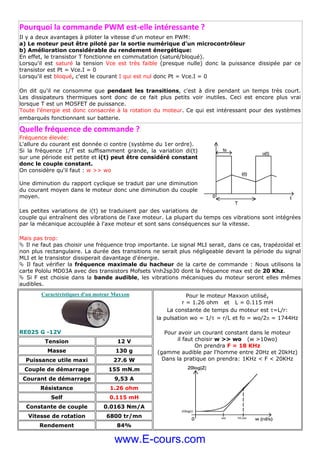
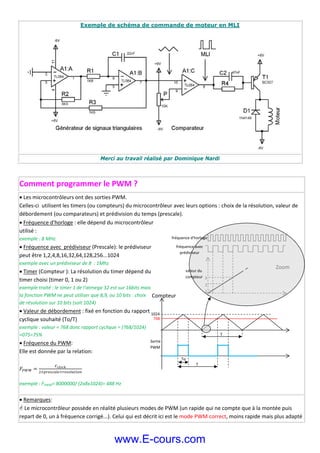
Le document présente comment faire varier la vitesse d'un moteur à courant continu par la modulation en largeur d'impulsions (PWM). Il explique les concepts fondamentaux tels que la force électromotrice, le couple, et les avantages de la PWM, notamment l'amélioration du rendement énergétique et le contrôle via des microcontrôleurs. Il aborde également les aspects techniques comme la fréquence de commande, les caractéristiques d'un moteur spécifique et des exemples de programmation avec des microcontrôleurs.












































































![cours raspberry [Enregistrement automatique].pptx](https://cdn.slidesharecdn.com/ss_thumbnails/coursraspberryenregistrementautomatique-260206145736-b1015531-thumbnail.jpg?width=640&height=640&fit=bounds)
