Téléchargé 190 fois
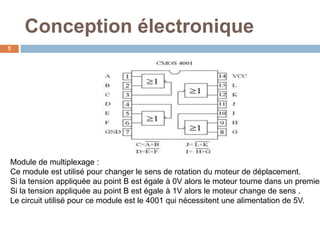


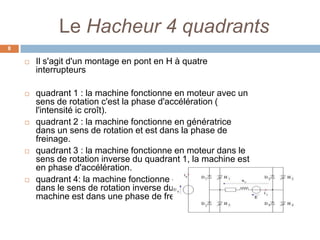

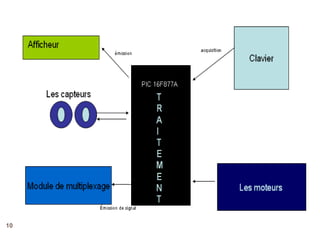
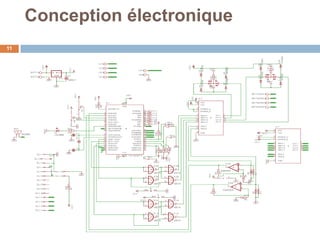
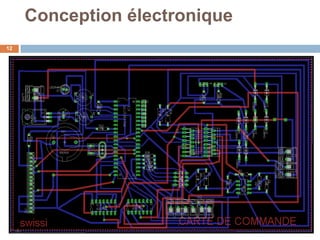

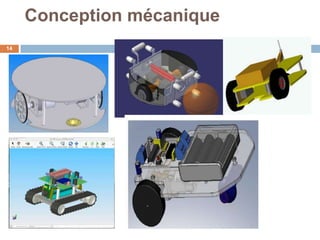

Le document décrit la conception d'un robot mobile à roues, en détaillant les aspects électroniques et mécaniques ainsi que l'algorithme de commande utilisé. Il présente les composants tels que le micro-contrôleur 16f877, le module de multiplexage et le circuit L298 pour la gestion des moteurs, ainsi que les algorithmes pour la détection des obstacles. En conclusion, le robot est conçu pour atteindre une position finale en évitant les obstacles grâce à des capteurs ultrasons.




















































































