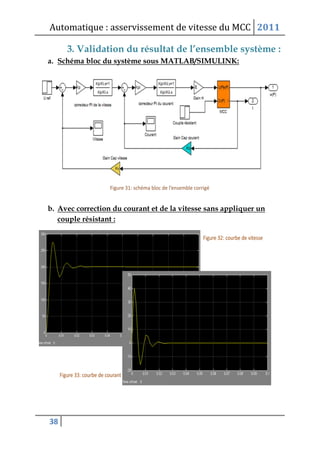
Le document traite de l'asservissement de vitesse d'un moteur à courant continu (MCC) en vue de maintenir une vitesse constante malgré des perturbations. Il couvre la modélisation du système, y compris le moteur, le hacheur et les capteurs, ainsi que l'étude des boucles de vitesse et de courant pour le choix du correcteur. Enfin, des validations théoriques des résultats par simulation sur MATLAB/Simulink sont également présentées.








![Automatique : asservissement de vitesse du MCC 2011
14
2.3. Mise en équation :
( )
et 0<T0<T avec
( )
Si l’on souhaite tracer le diagramme de Bode, il suffit de poser : et on
obtient :
( ) [ ( ) ( )]
D’où {
| ( )|
( ( )) [
( )
( )
]](https://image.slidesharecdn.com/asservissementdevitessedumcc-200306072052/85/Asservissement-de-vitesse_du_mcc-15-320.jpg)






















































![[C elm][co]conversion electromecanique](https://cdn.slidesharecdn.com/ss_thumbnails/celmcoconversionelectromecanique-200227124318-thumbnail.jpg?width=640&height=640&fit=bounds)

















![cours raspberry [Enregistrement automatique].pptx](https://cdn.slidesharecdn.com/ss_thumbnails/coursraspberryenregistrementautomatique-260206145736-b1015531-thumbnail.jpg?width=640&height=640&fit=bounds)




