Téléchargé 3 922 fois




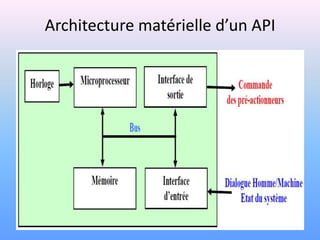




















Le document traite des automatismes industriels, spécifiquement des automates programmables, en expliquant leur définition, leur architecture et leur fonctionnement. Il détaille les composants d'un système automatisé, tels que les actionneurs, capteurs et préactionneurs, ainsi que les applications industrielles de ces technologies. L'évolution historique des automates et les fabricants clés du secteur sont également mentionnés.













































































