Téléchargé 646 fois





















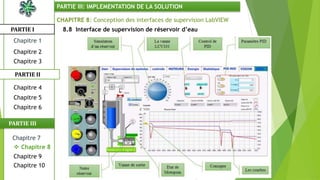



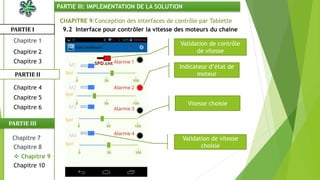




Le document présente une étude et conception d'un système automatique pour l'alimentation d'un four à céramique, encadré par des professionnels du domaine. Il détaille l'analyse de l'existant, la proposition de solutions, et l'implémentation d'améliorations innovantes, incluant la programmation, le câblage électrique et les interfaces de supervision. La conclusion souligne la faisabilité de la solution adoptée et les perspectives d'évolution du projet.




































![Autamatisation_d'une_station_de_remplissage[1].pptx](https://cdn.slidesharecdn.com/ss_thumbnails/autamatisationdunestationderemplissage1-250304235034-fa82f66e-thumbnail.jpg?width=640&height=640&fit=bounds)














![cours raspberry [Enregistrement automatique].pptx](https://cdn.slidesharecdn.com/ss_thumbnails/coursraspberryenregistrementautomatique-260206145736-b1015531-thumbnail.jpg?width=640&height=640&fit=bounds)
