Téléchargé 184 fois



















![CHAPITRE
1
CONTEXTE G ´EN ´ERAL DU
STAGE
Ce chapitre est une description globale du Groupe Zodiac Aerospace [1], plus pr´ecis´ement
du d´epartement "Zodiac Security and Sensing Management" ; il donne une vue g´en´erale
de celle-ci en pr´esentant son historique, ses diff´erentes branches et ses activit´es princi-
pales ainsi le contexte g´en´erale du projet en citant les objectifs, la mission qui nous a
´et´e confi´ee pendant notre stage ainsi que la m´ethodologie du travail suivie.
27](https://image.slidesharecdn.com/71307456-3f85-4149-b324-0c6f9c25cb6e-160220232206/85/Rapport-27-320.jpg)





![38 2.1. DO-178B
2.1 DO-178B
La communaut´e a´eronautique a mis en place plusieurs documents de r´ef´erence, ces
documents sont utilis´es par les diff´erentes entit´es qui interviennent dans le d´eveloppement
d’un logiciel embarqu´e a´eronautique dont on cite :
| Autorit´es de certification et organisations gouvernementales (EASA, FAA,. . .) ;
| Avionneurs(le client) ;
| Syst´emiers et ´equipementiers (comme le cas de Zodiac Aerospace) ;
| Et aussi, industriels du logiciel, universitaires.
Le client fournit les sp´ecifications du syst`eme, suit le d´eveloppement chez l’´equipementier,
´eventuellement, m`ene des audits, et assure la communication avec les autorit´es de certi-
fication. Les autorit´es de certification m`enent des audits chez l’´equipementier et donnent
leur agr´ement pour l’utilisation du logiciel sur l’avion.
2.1.1 Historique
| 1980 : initiatives diverses en Europe et aux Etats-Unis ;
| 1982 : publication DO-178 / ED-12 : Certifications A310, A300/600, B757, B767. . .
| 1985 : publication DO-178A / ED-12A : Certifications A320, B737-300, B737-400,
et A340. . .
| 1993 : publication DO-178B / ED-12B ;
| 2012 : publication DO-178C / ED-12C
2.1.2 Application de la norme DO-178B
La DO-178B [2] est utilis´ee en a´eronautique civile et militaire, pour les logiciels
int´egr´es dans les syst`emes et ´equipements de bord. On peut cependant l’utiliser comme
r´ef´erence de certification pour des avions militaires.
2.1.3 Certification
D´efinition : C’est la reconnaissance l´egale, par l’autorit´e de certification, du fait qu’un
produit, un service, une organisation, ou une personne est conforme aux exigences. En
particulier, la certification d’un produit implique : le processus d’´evaluation de la concep-
tion d’un produit dans le but de garantir qu’il est conforme `a un ensemble de r`egles
applicables `a ce type de produit afin de d´emontrer un niveau acceptable de s´ecurit´e.
2.1.3.1 Conditions de d´efaillance
Sur l’´echelle de gravit´e, la norme DO-178B d´efinie les degr´es de d´efaillances suivants :
1. Catastrophique : Dans le cas o `u les conditions de panne sont susceptibles d’empˆecher
la poursuite en toute s´ecurit´e d’un vol et d’un atterrissage ;
2. Dangereuse : Les conditions de panne sont susceptibles de r´eduire les possibilit´es
de l’a´eronef ou la capacit´e de l’´equipage `a faire face `a des conditions hostiles
pouvant aller jusqu’ `a :
| une r´eduction importante des marges de s´ecurit´e ou des capacit´es fonction-
nelles ;](https://image.slidesharecdn.com/71307456-3f85-4149-b324-0c6f9c25cb6e-160220232206/85/Rapport-38-320.jpg)


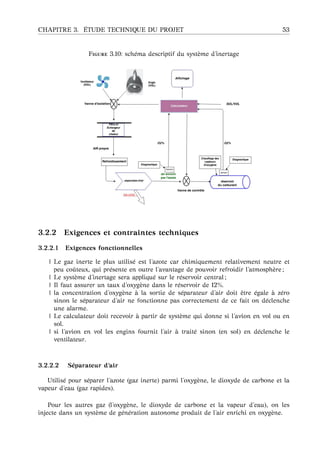
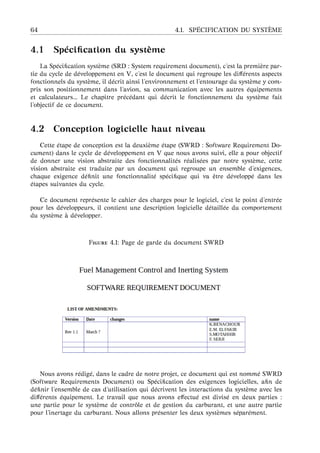
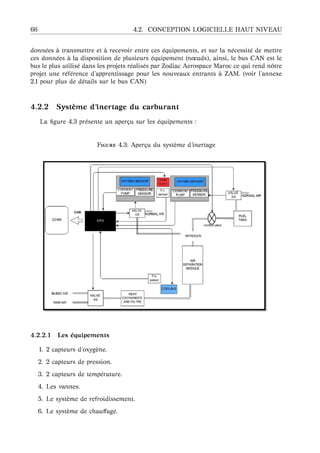
![44 3.1. SYST `EME DE CONTR ˆOLE DU CARBURANT
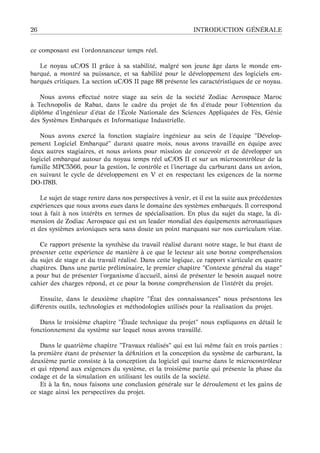
3.1 Syst `eme de contrˆole du carburant
3.1.1 Le syst `eme et son concept
Le syst`eme contrˆole du carburant [3] a pour but de stocker la quantit´e n´ecessaire
de carburant dans les r´eservoirs afin de fournir une quantit´e constante de carburant
sous pression `a un ou plusieurs moteurs. Dans ce chapitre, on verra la description en
d´etail des sous-syst`emes principaux [4] (l’alimentation de l’APU et du moteur, S´equence
d’alimentation des moteurs, Transfert du carburant des r´eservoirs ext´erieurs vers les
r´eservoirs internes, All´egement de la charge d’aile, Transfert par gravit´e, Largage de
carburant, Un syst`eme de refroidissement Hydraulique, chargement et d´echargement du
carburant) du syst`eme contrˆole de carburant.
En g´en´eral, le syst`eme [5] de contrˆole du carburant comprend les sous-syst`emes sui-
vants :
| L’alimentation de l’APU et du moteur.
| S´equence d’alimentation des moteurs.
| Transfert du carburant des r´eservoirs ext´erieurs vers les r´eservoirs internes.
| All´egement de la charge d’aile.
| Transfert par gravit´e.
| Largage de carburant.
| Un syst`eme de refroidissement Hydraulique.
| Chargement et d´echarger du carburant.
F 3.1: Alimentation des moteurs et de l’APU](https://image.slidesharecdn.com/71307456-3f85-4149-b324-0c6f9c25cb6e-160220232206/85/Rapport-44-320.jpg)


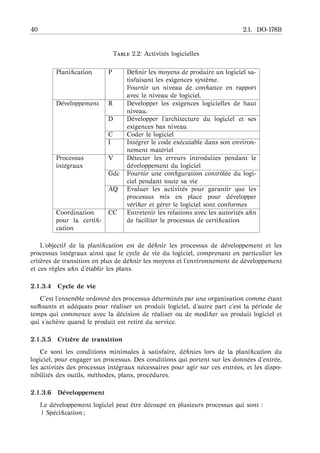
![CHAPITRE 3. ´ETUDE TECHNIQUE DU PROJET 47
permettent aux moteurs d’ˆetre aliment´es par gravit´e si les pompes des r´eservoirs in-
ternes ´echouent. (NB : les pompes du r´eservoir central ne sont pas ´equip´ees de vannes
d’aspiration. En plus, l’alimentation par gravit´e n’est pas possible `a partir du r´eservoir
central).
Une pompe `a carburant op´erant par un moteur DC fournit le carburant du r´eservoir
central au d´emarrage de l’APU lorsque la pression d’alimentation en carburant est faible
(en raison de la perte des pompes de r´eservoir ou de la perte de l’alimentation ´electrique
AC normale). Cette pompe fonctionne normalement sur le bus AC ESS, mais change
vers le BUS AC STAT INV si le BUS AC ESS ´echoue.
3.1.2.2 S´equence d’alimentation en carburant
Un syst`eme de transfert de carburant est n´ecessaire dans les applications o `u plu-
sieurs r´eservoirs sont utilis´es pour le stockage de combustible pour faire en sorte que le
carburant est consomm´e `a partir de diff´erents r´eservoirs selon un plan pr´ed´etermin´e. Ce
plan (ou la s´equence de la consommation de carburant) prend en compte de nombreuses
consid´erations op´erationnelles, y compris :
| Variation CG d’a´eronef au cours de la consommation de carburant.
| All´egement de la charge d’aile.
| Les quantit´es minimales et maximales de l’alimentation du carburant.
| Maintenir l’´equilibre lat´eral de l’a´eronef automatiquement.
Le contrˆole du syst`eme de transfert du carburant peut ˆetre soit sous le contrˆole direct
de l’´equipage de conduite ou par un syst`eme de gestion de carburant automatis´e. Les
r´eservoirs vident dans la s´equence suivante [4] :
1. R´eservoir central (jusqu’ `a 550 kg).
2. R´eservoirs internes (jusqu’ `a 750 kg dans chaque r´eservoir interne).
3. R´eservoirs externes (carburant transf´er´e dans les r´eservoirs int´erieurs).
Lorsqu’un r´eservoir int´erieur est plein (retour du carburant du syst`eme de refroidis-
sement), la pompe du r´eservoir central associ´ee s’arrˆete, et laisse la main `a la pompe
int´erieure jusqu’ `a environ 500 kg de son carburant a ´et´e utilis´e, et puis continu l’ali-
mentation depuis le r´eservoir central.
3.1.2.3 Transfert de carburant de l’ext´erieur vers les r´eservoirs internes
| Les vannes de transfert s’ouvrent automatiquement lorsque le carburant int´erieur
du r´eservoir atteint le faible niveau (environ 750 kg), ce qui permet de vidanger le
carburant de l’ext´erieur vers r´eservoirs internes. Les vannes restent ouvertes tout
au long du vol. Elles se ferment automatiquement `a l’op´eration du ravitaillement
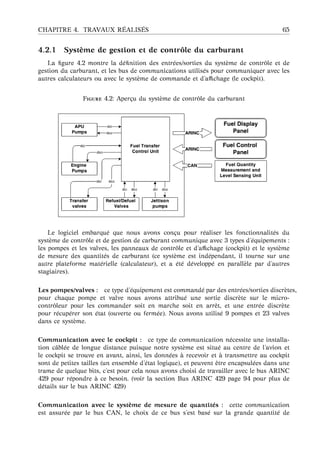
suivant (mode de s´election `a la position REFUEL).](https://image.slidesharecdn.com/71307456-3f85-4149-b324-0c6f9c25cb6e-160220232206/85/Rapport-47-320.jpg)

![50 3.1. SYST `EME DE CONTR ˆOLE DU CARBURANT
L’exigence de largage du carburant est obtenue par la diff´erence entre le maximum
du poids de d´epart et le maximum du poids d’atterrissage. Largage de carburant est
s´electionn´e par l’´equipage de conduite via des commutateurs de surveillance pour ar-
mer et s´electionner le syst`eme. L’´equipage peut s´electionner une charge de carburant
sp´ecifique `a laquelle la fonction largu´e est annul´ee. Sinon, le largage continue jusqu’ `a
ce que la masse `a l’atterrissage maximale soit atteinte. Les pompes de largage sont
situ´ees dans les r´eservoirs internes. Lorsque le largage du carburant est activ´e depuis
le cockpit, le syst`eme lib`ere des milliers de kilos de carburant par minute.
La plupart des syst`emes lib`erent le carburant `a un rythme suffisamment rapide que le
poids total de l’avion est r´eduit de masse maximale au d´ecollage de masse `a l’atterrissage
maximale certifi´ee (MCLW) en quinze minutes ou moins.
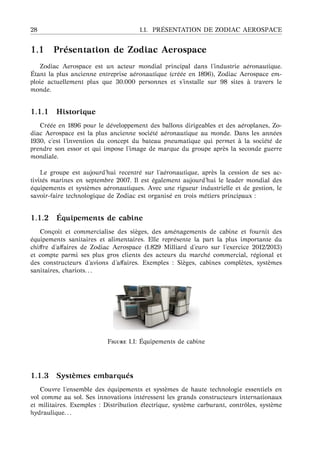
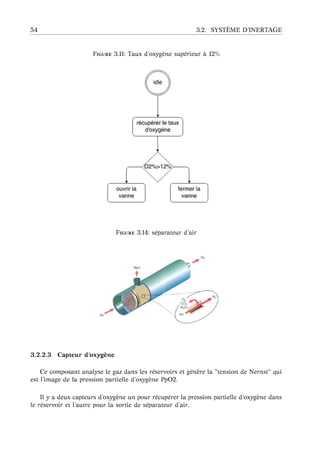
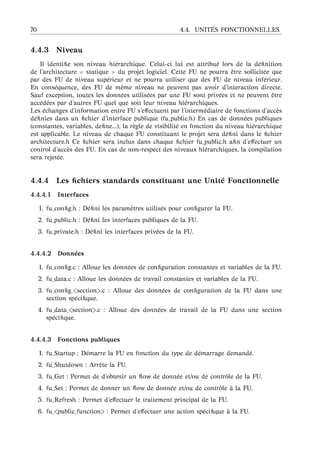
3.1.2.7 Ravitaillement - d´echargement du combustible
Deux points de ravitaillement (figure 3.7) sont install´es sous les ailes permettant le
ravitaillement soit du cˆot´e droit ou gauche de l’avion. Un panneau de ravitaillement
est situ´e sur le fuselage sous l’aile droite ou sous la droite ou la gauche `a cˆot´e de
l’accouplement de chargement.
Une galerie relie le raccord de ravitaillement en carburant `a la soupape de ravitaillement
en carburant de chaque r´eservoir. Le ravitaillement est normalement automatique, la
F 3.7: Chargement et couplage
charge de carburant n´ecessaire ´etant mise sur la pr´es´election. Le contrˆole manuel est
´egalement disponible.
| Ravitaillement automatique [6] commence par les cellules ext´erieures. Si la charge
de carburant s´electionn´e d´epasse la capacit´e du r´eservoir de l’aile, le r´eservoir
central est ravitaill´e en mˆeme temps. Quand une cellule ext´erieure est pleine, le
carburant d´eborde dans la cellule int´erieure par un tuyau de d´eversement. Lorsque
les r´eservoirs contiennent la quantit´e pr´es´electionn´ee `a charger ou lorsque les
capteurs d´etectent un niveau de carburant ´elev´e, les vannes de ravitaillement se
ferment automatiquement.
| L’avion peut ˆetre ravitaill´e seulement lorsque la puissance de la batterie est dis-
ponible.](https://image.slidesharecdn.com/71307456-3f85-4149-b324-0c6f9c25cb6e-160220232206/85/Rapport-50-320.jpg)



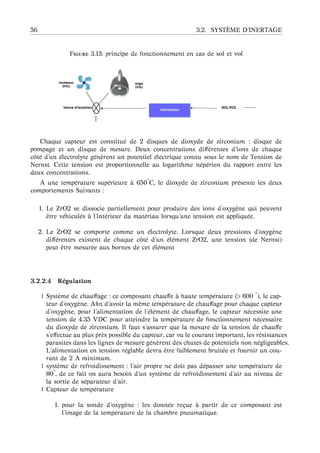


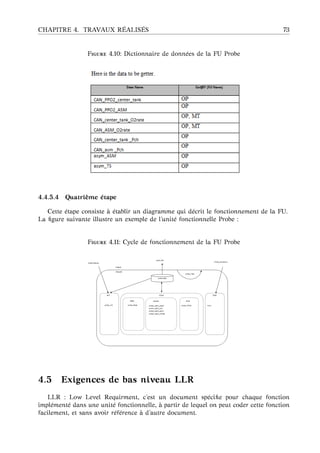
![CHAPITRE 3. ´ETUDE TECHNIQUE DU PROJET 59
F 3.19: Fonctionnement de la pompe du courant
V5 celle pour la plus faible (pression atteinte dans la chambre par le proc´ed´e de
pompage). [7]
3.2.2.6 Calcul du pression partielle d’oxyg `ene
| Les moments o `u la tension de Nernst est ´egale `a V2, V3 et V4 se calculent par
les formules suivantes :
t1 = tv3 − tv2
t2 = tv4 − tv3
t4 = tv3 − tv4
t5 = tv2 − tv3
| La dur´ee de cycle td est calcul´ee comme suit :
| La dur´ee du cycle de pompage est fonction de la pression partielle de l’oxyg`ene
du m´elange de gaz `a mesurer. Plus la pression d’oxyg`ene ambiante est ´elev´ee, plus
long sera le temps mis par la pompe ionique pour ´evacuer et remplir la chambre
de mesure. Il en d´ecoule que le cycle de pompage est proportionnel `a la pression
partielle d’oxyg`ene en contact avec le capteur. La dur´ee du cycle correspond donc
`a la p´eriode de la tension de Nernst tp.
| En th´eorie, comme tensions de r´ef´erence V1 et V5 on peut choisir des valeurs
quelconques. Cependant, en pratique, les consid´erations suivantes doivent ˆetre
prises en compte :
1. Double couche ´electrique
2. Temps de r´eponse
3. Compensation en temp´erature](https://image.slidesharecdn.com/71307456-3f85-4149-b324-0c6f9c25cb6e-160220232206/85/Rapport-59-320.jpg)

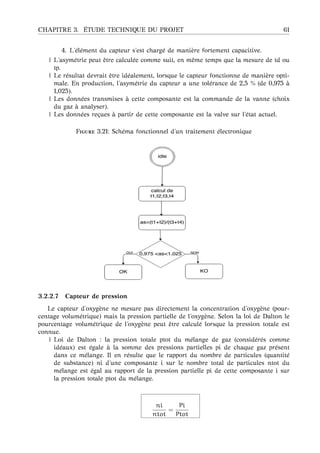


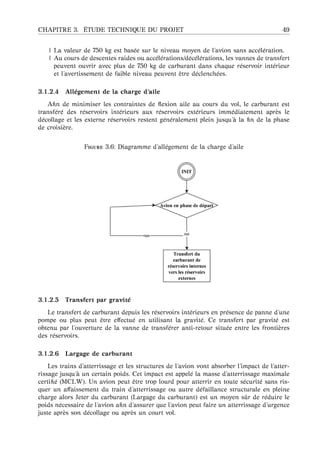
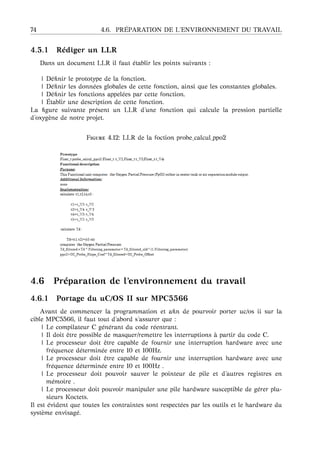
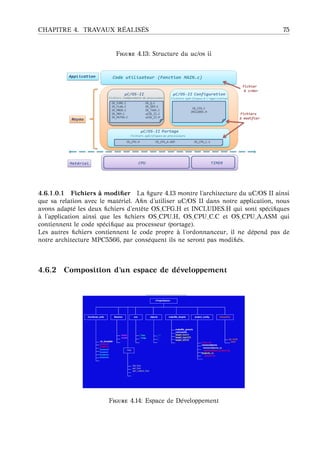
![CHAPITRE 4. TRAVAUX R ´EALIS ´ES 69
F 4.6: Architecture Dynamique
Ces architectures avec la description de chaque Unit´e Fonctionnelles sont regroup´es
dans le document nomm´e "FMCIS Software Design Document", la figure 4.4 montre la
page de garde de ce document.
4.4 Unit´es fonctionnelles
Unit´e fonctionnelle [8] : Sous-ensemble d’un logiciel complexe r´ealisant une fonc-
tionnalit´e particuli`ere ou fournissant des services g´en´eraux. Une FU est caract´eris´ee par
les propri´et´es suivantes :
4.4.1 Nom et Pr´efixe
Une FU est identifi´ee de fa¸con unique par un Nom (ex : Watchdog) ainsi qu’un
Pr´efixe associ´e (ex : wd_...). Ce pr´efixe (un seul mot court en minuscule) d´ebutera le nom
de chacun de ses constituant.
4.4.2 Type
Il identifie son comportement principal :
| Librairie : La FU est constitu´ee de fonctions utilitaires ind´ependantes regroup´ees
sur un th`eme (ex : Math, String . . . ). Ces FU sont d´etermin´es le plus souvent
au moment du design pour factoriser des ´el´ements de traitement. Les fonctions
fournies n’assurent pas `a elle seule la r´ealisation d’une exigence mais y contribue.
| Passive : La FU assure un service d´efini par des exigences mais doit ˆetre sollicit´ee
par une autre FU pour assurer sa fonction.
| Active :La FU assure un service d´efini par des exigences et fonctionne de fa¸con
autonome (Tˆache, S´equenceur, Interruption. . . ).](https://image.slidesharecdn.com/71307456-3f85-4149-b324-0c6f9c25cb6e-160220232206/85/Rapport-69-320.jpg)









![CONCLUSION ET PERSPECTIVES 85
Ce stage fut une v´eritable exp´erience professionnelle. Nous nous sommes adapt´es fa-
cilement au milieu de l’entreprise, grˆace aux diff´erentes experiences que nous avons eues
durant notre formation, nous avons d´ecouvert la d´emarche `a suivre pour d´evelopper les
logiciels embarqu´es qui seront impl´ement´es dans les calculateurs des avions. Lors de ce
stage nous avons pu constater qu’on est capable de mener `a bien un projet du d´ebut `a
la fin, en effet nous avons effectu´e la totalit´e des ´etapes d’analyse, de conception et de
r´ealisation.
Grˆace `a ce stage nous nous sommes am´elior´es en m´ethodes d’analyses, en r´eflexion
et en prise de d´ecisions. Nous avons ´egalement compris l’approche `a suivre pour le
d´eveloppement des logiciels `a haute criticit´e [Selon la norme DO-178B]. Nous avons
approfondi aussi nos connaissances sur le fonctionnement du noyau temps r´eel uC/OS
II qui est utilis´e dans plusieurs domaines, notament l’occcasion que nous avons eue de
travailler sur une version certifi´ee.
Ce stage ´etait parfaitement adapt´e `a notre formation `a l’ENSA de F`es, en effet les
parties gestion, analyse et programmation, points centrales de la formation, ´etaient les
principaux objectifs de notre mission `a Zodiac Aerospace Maroc. Il nous a confort´e dans
l’id´ee de poursuivre dans cette voie et de faire des syst`emes embarqu´es le point central
de notre carri`ere professionnelle.
Ce stage conclus notre troisi`eme ann´ee de cycle d’ing´enieur, et en partie grˆace `a lui
nous avons la conviction d’avoir acquis un bon niveau dans les syst`emes embarqu´es en
g´en´erale qui nous permettra de r´eussir dans le domaine professionnel.](https://image.slidesharecdn.com/71307456-3f85-4149-b324-0c6f9c25cb6e-160220232206/85/Rapport-85-320.jpg)

![ANNEXE
A
OUTILS UTILIS ´ES
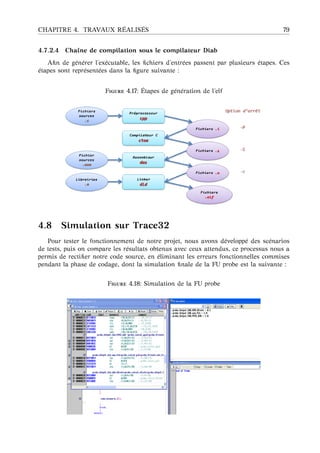
1.1 Trace32 Lauterbach
Lauterbach GmbH est une soci´et´e Allemande d’automatisation de la conception
´electronique sp´ecialis´ee dans les ´emulateurs in-circuit et dans les analyseurs logiques
utilis´es pour le d´ebogage des syst`emes embarqu´es .
L’entreprise a ´et´e fond´ee en 1979 par Lothar Lauterbach. En 2009, l’entreprise a ´et´e
rebaptis´ee de Lauterbach Datentechnik GmbH `a Lauterbach GmbH.
La soci´et´e sert une niche de march´e des ´emulateurs in-circuit, en particulier sur les
syst`emes utilisant JTAG, qu’elle vend sous la marque TRACE32 [9]. Il est le leader du
march´e mondial dans le domaine des outils de d´ebogage assist´e par le mat´eriel pour
les syst`emes embarqu´es, avec plus de 80 000 ´emulateurs vendus. Ils ont livr´e 65 000
licences de d´ebogage pour le populaire microprocesseur ARM seul, et ils supportent tous
les cœurs ARM disponibles. Cette exclusivit´e leur a permis de se d´evelopper fortement
dans les ventes au cours des derni`eres ann´ees (plus de 90 millions USD en 2011, 83
millions d’USD en 2007 avant la crise financi`ere).
Beaucoup de d´eveloppeurs de syst`emes embarqu´es aimeraient voir un niveau plus
´elev´e de la normalisation de la mise au point sur puce et la logique de trace ainsi
que d’une r´eduction du nombre de broches sans aucune perte de performance. Afin de
jouer un rˆole actif dans le d´eveloppement des technologies de tra¸cage et de d´ebogage
innovantes, Lauterbach a particip´e aux comit´es internationaux suivants au cours des
derni`eres ann´ees : Nexus (standard), Groupe de travail de d´ebogage MIPI, SPRINT Fo-
rum et Power.org.
87](https://image.slidesharecdn.com/71307456-3f85-4149-b324-0c6f9c25cb6e-160220232206/85/Rapport-87-320.jpg)
![88 1.2. UC/OS II
Lauterbach a des filiales locales en Royaume-Uni, Etats-Unis, Japon, France, Italie
et Chine . La soci´et´e est une soci´et´e priv´ee d´etenue par la famille fondatrice, les deux
fr`eres Lothar et Stephan Lauterbach ainsi que ses administrateurs.
F 1.1: Emulateur de MPC5566, Lauterbach
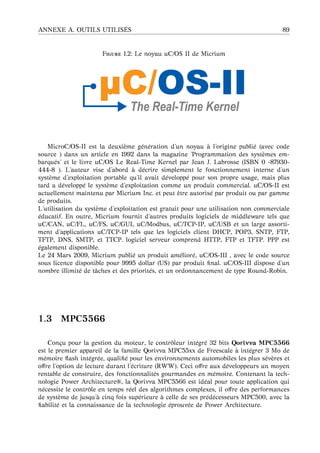
1.2 uC/OS II
MicroC/OS-II [10] (commun´ement appel´e comme uC/OS-II), est l’acronyme pour
Syst`eme d’Exploitation pour Micro-contrˆoleur Version 2. C’est un noyau de syst`eme
d’exploitation temps r´eel d´edi´e pour micro-processeurs, multi-tˆaches et bas´e sur le prin-
cipe de priorit´es avec un ordonnanceur pr´eemptif. Il est ´ecrit principalement en C. Il est
destin´e `a une utilisation dans des syst`emes embarqu´es. Ses caract´eristiques sont :
| Il s’agit d’un tr`es petit noyau temps r´eel.
| L’empreinte m´emoire est d’environ 20 Ko pour un noyau enti`erement fonctionnel.
| Le code source est ´ecrit en C ANSI
| Tr`es portable, ROMable, tr`es ´evolutive, pr´eventive en temps r´eel, d´eterministe,
noyau multi-tˆache.
| Il peut g´erer jusqu’ `a 64 tˆaches (56 tˆaches de l’utilisateur disponibles).
| Il dispose d’une connectivit´e avec uC/GUI et uC/FS (GUI et des syst`emes de fichiers
pour uC/OS II).
| Il est port´e `a plus de 100 microprocesseurs et micro-contrˆoleurs.
| Il est simple `a utiliser et simple `a mettre en œuvre mais tr`es efficace par rapport
au ratio prix/performance.
| Il supporte tous les types de processeurs de 8 bits `a 64 bits.](https://image.slidesharecdn.com/71307456-3f85-4149-b324-0c6f9c25cb6e-160220232206/85/Rapport-88-320.jpg)


![ANNEXE
BBUS DE COMMUNICATION
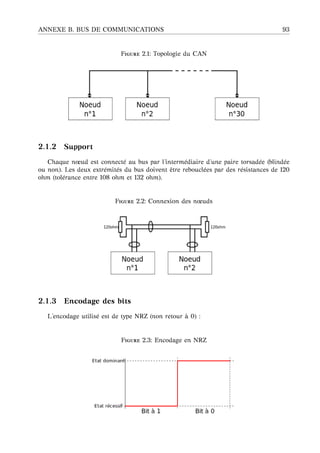
2.1 Bus CAN
Le bus CAN [11] (Controller Area Network) est un bus syst`eme s´erie tr`es r´epandu
dans beaucoup d’industries, notamment l’automobile. Il a ´et´e normalis´e avec la norme
ISO 11898. Il met en application une approche connue sous le nom de multiplexage, et
qui consiste `a raccorder `a un mˆeme cˆable (un bus) un grand nombre de calculateurs
qui communiqueront donc `a tour de rˆole. Cette technique ´elimine le besoin de cˆabler
des lignes d´edi´ees pour chaque information `a faire transiter (connexion point- `a-point).
D`es qu’un syst`eme (voiture, avion, r´eseau t´el´ephonique. . .) atteint un certain niveau de
complexit´e, l’approche point- `a-point devient impossible du fait de l’immense quantit´e de
cˆablage `a installer et de son coˆut (en masse, mat´eriaux, main d’œuvre, maintenance).
L’introduction des bus multiplex´es (principalement le CAN) dans l’automobile avait
pour objectif de r´eduire la quantit´e de cˆables dans les v´ehicules (il y a jusqu’ `a 2 km
de cˆables par voiture), mais elle a surtout permis l’explosion du nombre de calculateurs
et capteurs distribu´es dans tout le v´ehicule, et des prestations correspondantes (baisse
de consommation, d´epollution, s´ecurit´e active/passive, confort, d´etection des pannes. . . ),
tout en n’augmentant pas trop les longueurs cˆabl´ees.
2.1.1 Topologie
CAN est un bus de donn´ees s´erie bidirectionnel half-duplex. Chaque ´equipement
connect´e, appel´e nœud , peut communiquer avec tous les autres.
92](https://image.slidesharecdn.com/71307456-3f85-4149-b324-0c6f9c25cb6e-160220232206/85/Rapport-92-320.jpg)
![94 2.2. BUS ARINC 429
2.1.4 Trames
Il existe 2 standards pour la couche de liaison de donn´ees : ISO 11898 part A : CAN
2.0A standard frame format (identification sur 11bits), ISO 11898 part B : CAN 2.0B
extended frame format (identification sur 29bits). Il existe plusieurs types de trame :
| Trame de donn´ees,
| Trame de requˆete,
| Trame d’erreur,
| Trame de surcharge.
Entre 2 trames, les ´emetteurs doivent respecter une pause (p´eriode d’inter-trame) ´equivalente
`a la dur´ee de 3 bits pendant laquelle le bus est maintenu `a l’´etat r´ecessif.
2.1.5 Trame de donn´ees
La trame de donn´ees sert `a envoyer des informations aux autres nœuds. Une trame
de donn´ees se compose de 7 champs diff´erents :
| Le d´ebut de trame ou SOF (Start Of Frame) mat´erialis´e par 1 bit dominant,
| Le champ d’arbitrage (identificateur) compos´e de 12 ou 30 bits,
| Le champ de commande (ou de contrˆole) compos´e de 6 bits,
| Le champ de donn´ees compos´e de 0 `a 64 bits (de 0 `a 8 octets),
| Le champ de CRC compos´e de 16 bits,
| Le champ d’acquittement compos´e de 2 bits,
| La fin de trame ou EOF (End of Frame) mat´erialis´ee par 7 bits r´ecessifs.
F 2.4: Trame de donn´ees
2.2 Bus ARINC 429
ARINC 429 [12] est une norme pour l’a´eronautique qui d´ecrit `a la fois une architec-
ture, une interface ´electrique et un protocole pour v´ehiculer des donn´ees num´eriques.
Au d´ebut du XXIe si`ecle, ARINC 429 est le bus informatique le plus r´epandu sur les
syst`emes avioniques complexes.
2.2.1 Historique
La norme ARINC 429 a ´et´e d´evelopp´ee et est maintenue par l’Airlines Electronic
Engineering Committee (AEEC), comit´e de la soci´et´e ARINC. ARINC 429 est issue de
la norme ARINC 419 qui fut la premi`ere `a d´ecrire 4 topologies de bus num´eriques pour
l’aviation commerciale, dont la premi`ere version a ´et´e publi´ee en 1966, et la derni`ere
mise `a jour faite en 19831,2. La premi`ere norme ARINC 429 (429-1) a ´et´e publi´ee en
avril 1978, et la version actuelle est la version 429-18 adopt´ee par l’AEEC en 20121.
Elle est compos´ee de 3 parties : Partie 1 : Description fonctionnelle, interface ´electrique,](https://image.slidesharecdn.com/71307456-3f85-4149-b324-0c6f9c25cb6e-160220232206/85/Rapport-94-320.jpg)


![BIBLIOGRAPHIE
[1] Zodiac Aerospace. Pr´esentation du groupe powerpoint sliders. 2013.
[2] EUROCAE. SOFTWARE CONSIDERATIONS IN AIRBORNE, SYSTEMS AND
EQUIPMENT CERTIFICATION. EUROCAE, 1999.
[3] Roy Langton, Chuck Clark, Martin Hewitt, and Lonnie Richards. Aircraft Fuel
Systems. John Wiley and Sons, 2009.
[4] Airbus. A320 Flight Crew Operating Manual. Airbus, 2003.
[5] FEDERAL AVIATION ADMINISTRATION. Pilot’s Handbook of Aeronautical
Knowledg. U.S. Department of Transportation, 2008.
[6] Airbus. A320 Flight Crew Operating Manual. Airbus, 2003.
[7] Boeing. Boeing B737 NG - Systems Summary [Fuel]. SmartCockpit.com, 2005.
[8] Coordinateur Technique des Architectures Zodiac Aerospace. Architecture functio-
nal unit architecture guide. 2013.
[9] Lauterbach. Training Simulator and Demo Software.
[10] Jean Labrosse. microC OS II The real time kernel second edition. 2002.
[11] Wikipedia. Control area network.
[12] Wikipedia. Arinc 429.
97](https://image.slidesharecdn.com/71307456-3f85-4149-b324-0c6f9c25cb6e-160220232206/85/Rapport-97-320.jpg)

Ce mémoire de projet de fin d'études présente la conception et la réalisation d'un logiciel embarqué pour la gestion et l'inertage du système carburant d'un aéronef, développé selon la norme DO-178B. Le projet a été réalisé au sein de Zodiac Aerospace Maroc et s'appuie sur le noyau temps réel µC/OS II pour l'architecture microcontrôleur MPC5566. L'objectif principal est de garantir la fiabilité et la sécurité des systèmes critiques dans l'avionique.















































