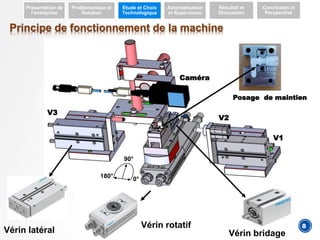
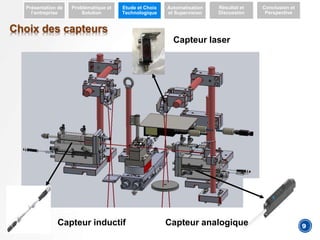
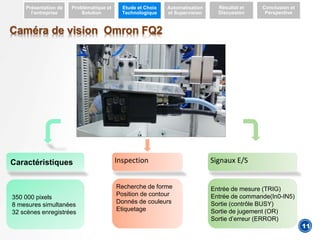
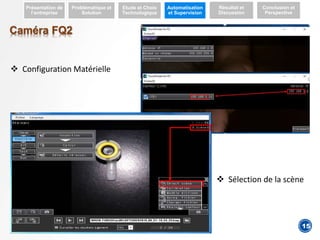
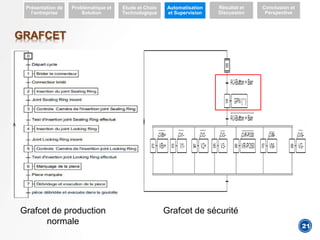
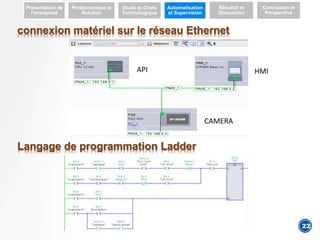
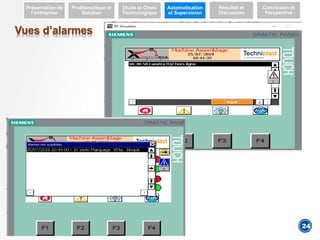
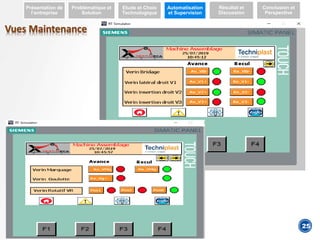
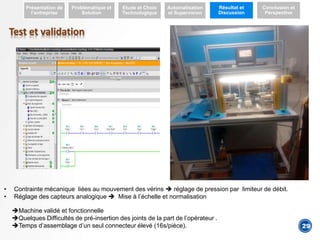
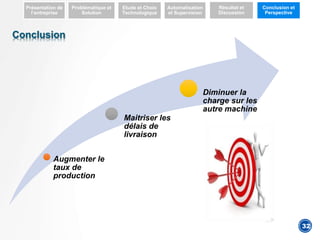
Le document décrit un projet de fin d'études sur la conception et l'automatisation d'une machine d'assemblage de connecteurs tournants. Il couvre divers aspects tels que la problématique, les choix technologiques, les résultats, ainsi que les perspectives d'amélioration de la production et de la rentabilité. La machine est conçue pour contrôler et tester les composants assemblés, avec une intégration possible d'un robot pour optimiser le processus.






























































![Soutenance PFE 1.pptx [Enregistrement automatique].pptx](https://cdn.slidesharecdn.com/ss_thumbnails/soutenancepfe1-220330095537-thumbnail.jpg?width=640&height=640&fit=bounds)







![cours raspberry [Enregistrement automatique].pptx](https://cdn.slidesharecdn.com/ss_thumbnails/coursraspberryenregistrementautomatique-260206145736-b1015531-thumbnail.jpg?width=640&height=640&fit=bounds)



