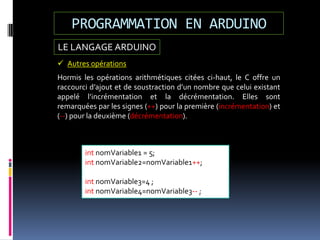
Le document présente les bases des microcontrôleurs (MCU) et de la carte Arduino Uno, en expliquant leur structure, fonctionnement et applications dans divers domaines. Il aborde également l'environnement Arduino, les spécifications techniques de la carte Uno, ainsi que des éléments de programmation en langage Arduino. En conclusion, il souligne la polyvalence des applications possibles grâce aux microcontrôleurs et à l'Arduino, tout en mentionnant les challenges liés à leur utilisation.
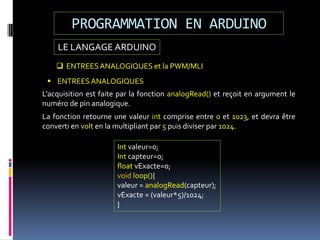
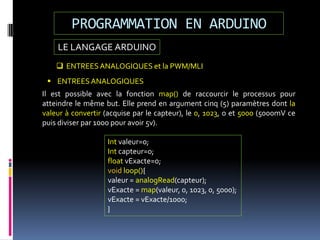
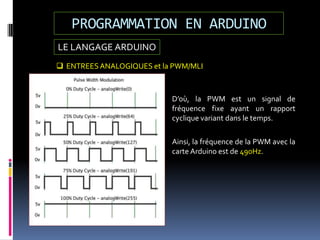
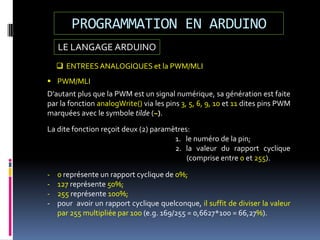
![LE LANGAGE ARDUINO
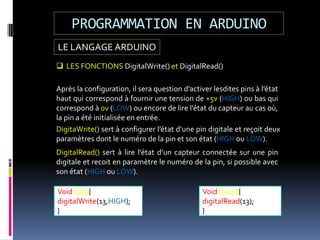
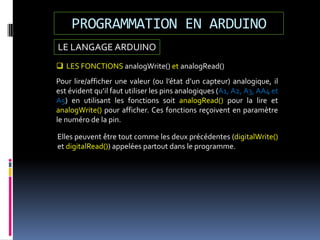
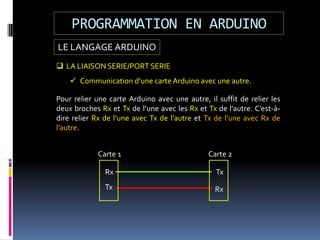
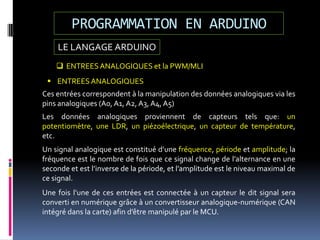
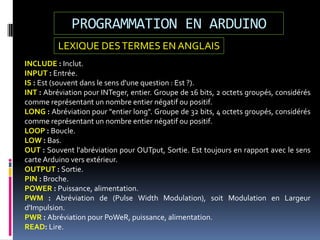
PROGRAMMATION EN ARDUINO
Déclaration des tableaux
Un tableau est une variable particulière contenant des lignes et des
colonnes. En d’autre terme un tableau est un ensemble fini
d'éléments de même type.
int tab[5] ;
int tab2[3][2] ;
int tab3[2] ;
Forme une dimension : <type> <nom_du_tableau> [<nombre_éléments>]
Forme 2D :<type> <nom_du_tableau> [<nombre_éléments1>][<nombre_éléments2>]](https://image.slidesharecdn.com/microcontroleurarduinouno-161230010605/85/Microcontroleur-arduino-uno-24-320.jpg)
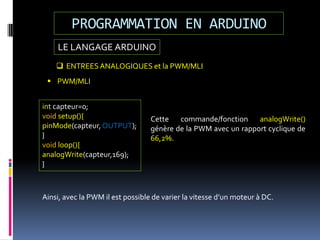
![LE LANGAGE ARDUINO
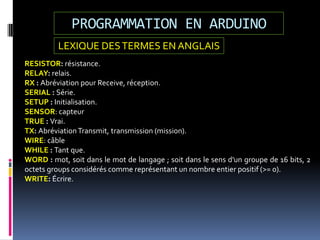
PROGRAMMATION EN ARDUINO
Affectation
Affecter une variable/tableau, c’est lui attribuer de l’information
(valeur) pour une bonne manipulation. Ce processus est remarqué
par l’opérateur égal (=) et des accolades {} pour le tableau.
int nomVariable1 = 5;
float nomVariable2 = 2.3 ;
char nomVariable3 =’a’;
long nomVariable4 = 1000;
int tab [5] = {1, 2, 3, 4, 5, 6} ;
float tab2 [3] = {1.0, 2.0, 3.0} ;
char tab [] = {’a’, ’c’} ;
Forme : <type> <nom_de_la_variable> = <valeur>](https://image.slidesharecdn.com/microcontroleurarduinouno-161230010605/85/Microcontroleur-arduino-uno-25-320.jpg)











































































![cours raspberry [Enregistrement automatique].pptx](https://cdn.slidesharecdn.com/ss_thumbnails/coursraspberryenregistrementautomatique-260206145736-b1015531-thumbnail.jpg?width=640&height=640&fit=bounds)

