Téléchargé 371 fois



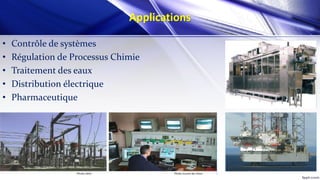
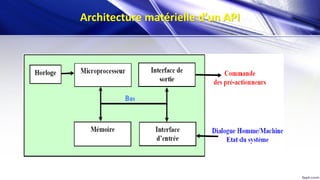
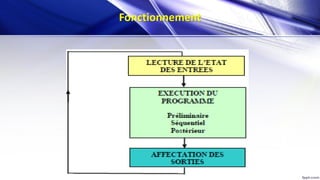
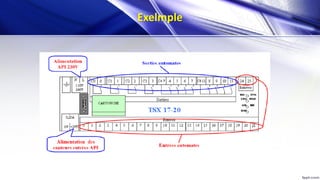




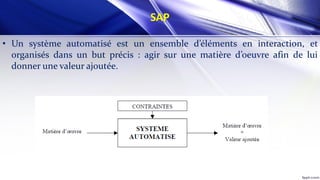


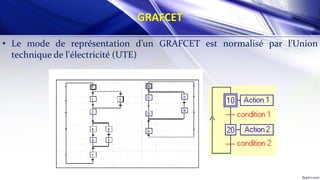

Le document présente les automates programmables industriels (API), leur définition, fonctionnement, et applications dans divers secteurs industriels. Il décrit également les composants de l'API, telles que les capteurs, actionneurs, et pré-actionneurs, ainsi que le grafcet, un outil de modélisation pour la représentation graphique des systèmes automatisés. Enfin, il aborde les avantages de l'automatisation, tels que l'augmentation de la productivité et la simplification des tâches humaines.
























































