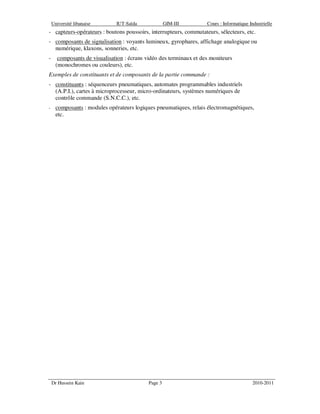
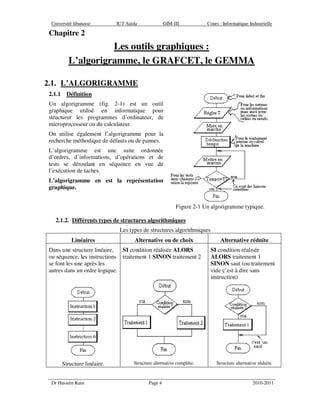
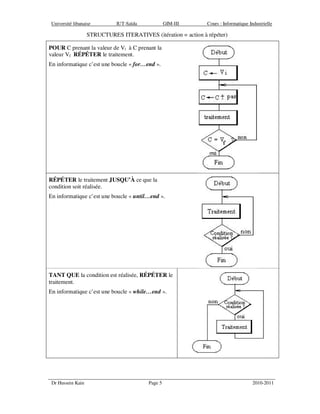
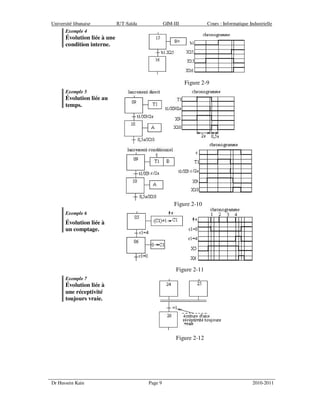
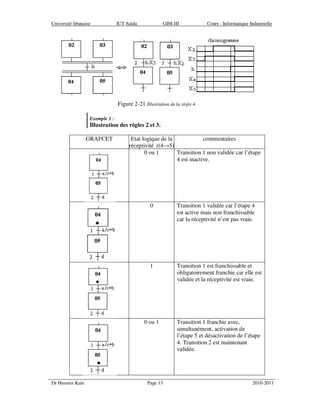
Le document présente les systèmes automatisés, définissant un système comme un ensemble de composants remplissant une fonction globale, et classifiant ces systèmes en trois catégories selon l'énergie utilisée. Il aborde également la structure d'un système automatisé, divisée en trois parties: la partie opérative, la partie relation, et la partie commande, décrivant leur fonctionnement et interconnexion. Enfin, il introduit des outils graphiques comme l'algorigramme et le grafcet, utilisés pour modéliser et représenter le comportement des systèmes automatisés.