Téléchargé 524 fois








![S.C. ULFG2-2009
20
W2 = Sqrt( Kmax2 +Rf / LJ ) = 44 rd/s [=(W3+W4)/2]
W3 = 1/τe = R/L = 37 rd/s
W4 = 1/τem = Kmax2/RJ = 52.5 rd/s
K0 = f/Kmax2 = 7.56e-3
Les diagrammes asymptotiques de Bode sontalors les suivants :
Sur MatLab:
>> H = TF([15.12e-3 7.56e-3] , [5.15e-4 0.046 1])
Transfer function:
0.01512 s + 0.00756
--------------------------
0.000515 s^2 + 0.046 s + 1
>> bode(H)
Va Donner :](https://image.slidesharecdn.com/17281795-commande-d-une-machine-a-courant-continu-a-vitesse-variable-141229143015-conversion-gate01/85/17281795-commande-d-une-machine-a-courant-continu-a-vitesse-variable-20-320.jpg)










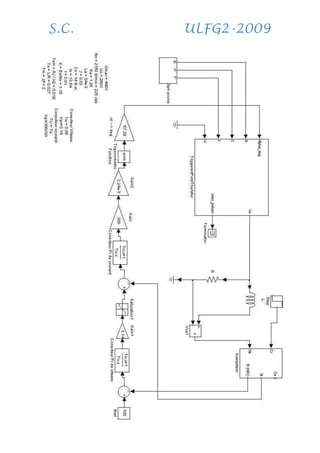

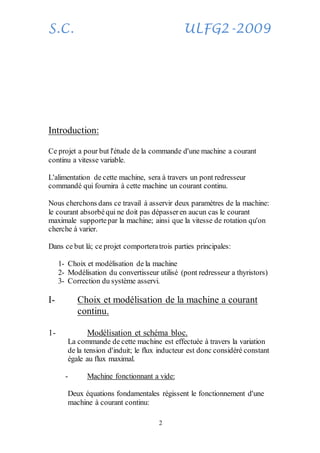
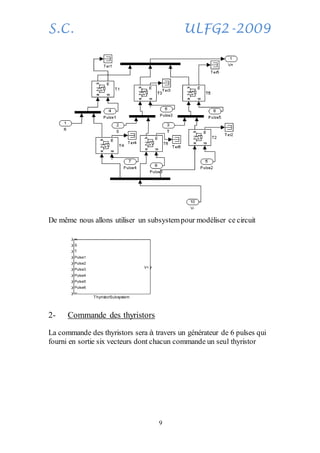
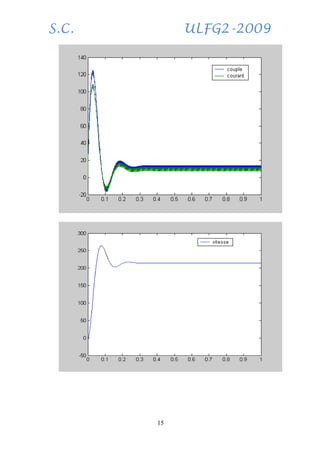
Le projet étudie la commande d'une machine à courant continu à vitesse variable, utilisant un pont redresseur pour alimenter la machine. L'analyse inclut la modélisation de la machine, du convertisseur, et des systèmes de correction pour contrôler le courant et la vitesse de la machine. Des simulations sont effectuées sur MATLAB-Simulink pour évaluer le comportement du système et ajuster les paramètres de contrôle.









































![[C elm][co]conversion electromecanique](https://cdn.slidesharecdn.com/ss_thumbnails/celmcoconversionelectromecanique-200227124318-thumbnail.jpg?width=640&height=640&fit=bounds)


















