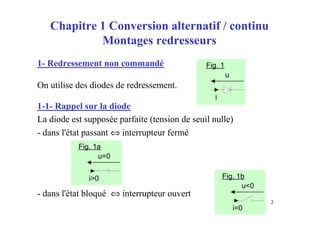
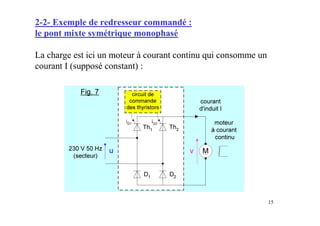
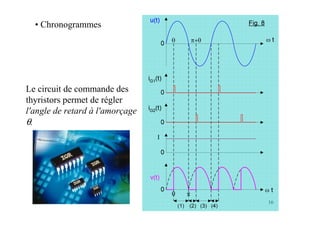
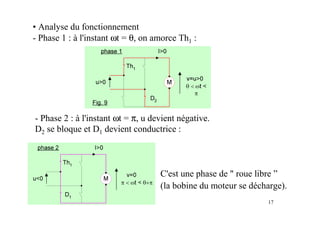
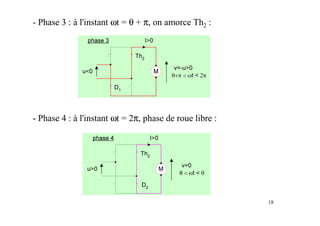
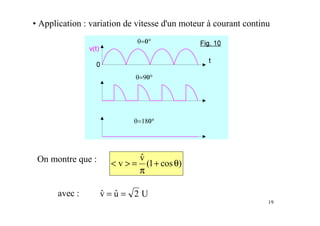
Le document traite des concepts fondamentaux de l'électronique de puissance, en se concentrant sur les diodes et les thyristors. Il explique le fonctionnement des montages redresseurs, notamment le pont de Graëtz et les principes de redressement non commandé et commandé. Des applications pratiques, comme l'alimentation continue et la variation de vitesse des moteurs à courant continu, sont également abordées.



































![Chap_1_Redresseurs.ppt [Mode de compatibilité].pdf](https://cdn.slidesharecdn.com/ss_thumbnails/chap1redresseurs-231011183554-fea50d0b-thumbnail.jpg?width=640&height=640&fit=bounds)







![[C stat][co]convertisseurs statiques](https://cdn.slidesharecdn.com/ss_thumbnails/cstatcoconvertisseursstatiques-191027204605-thumbnail.jpg?width=640&height=640&fit=bounds)


























