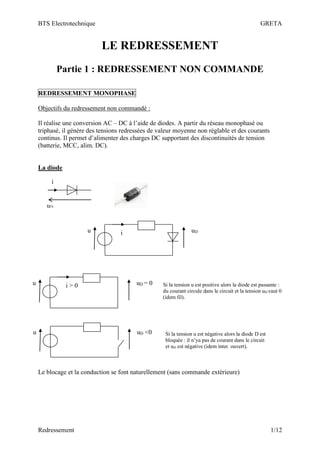
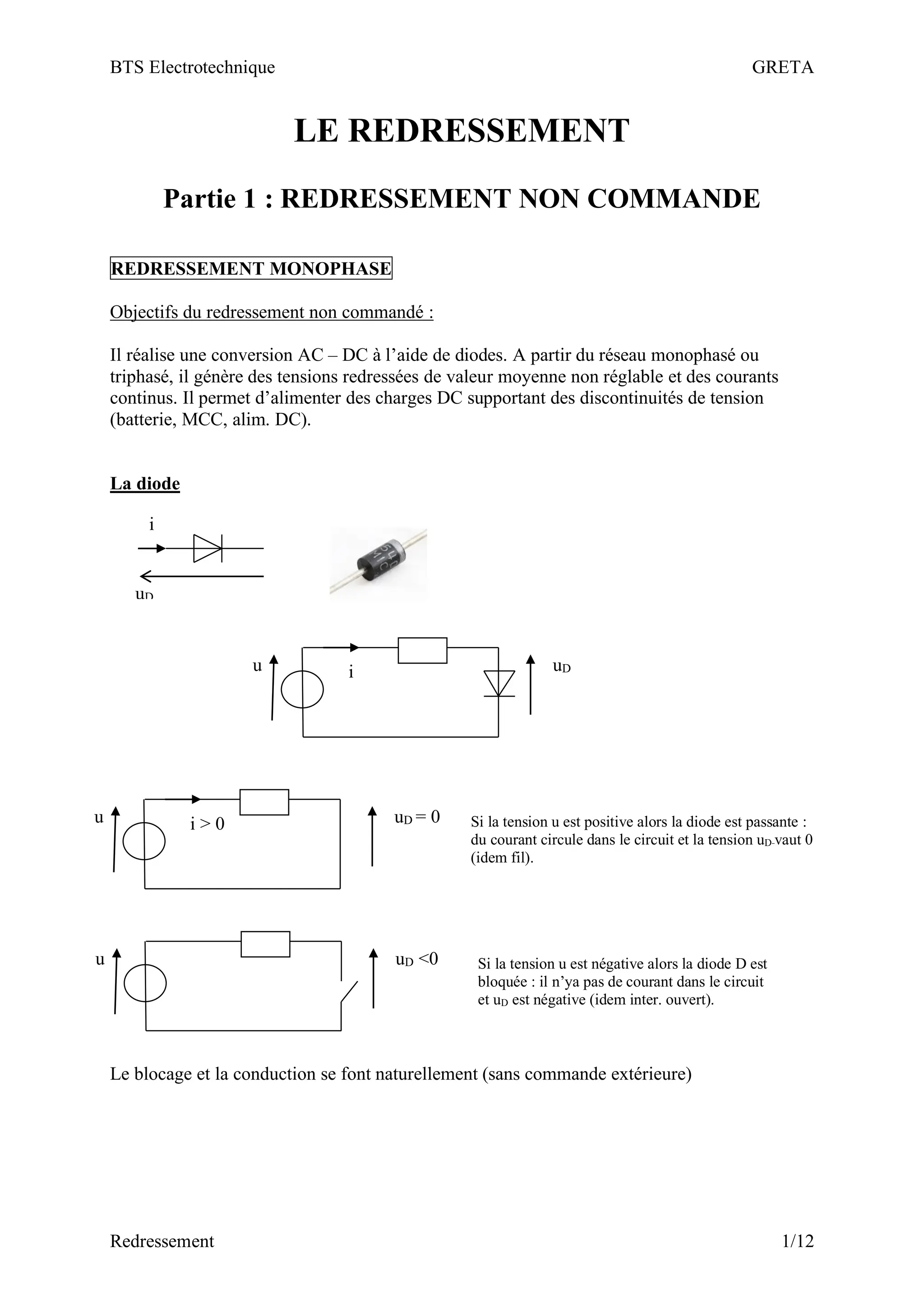
Le document traite des méthodes de redressement non commandé et commandé pour convertir des tensions AC en DC à l'aide de diodes et de thyristors. Il décrit les circuits de redressement monophase et triphasé, en expliquant les principes de fonctionnement et les caractéristiques des tensions redressées. Enfin, il aborde le contrôle de la tension et la variation de vitesse des moteurs à courant continu grâce à des systèmes de redressement commandés.










































![Chap_1_Redresseurs.ppt [Mode de compatibilité].pdf](https://cdn.slidesharecdn.com/ss_thumbnails/chap1redresseurs-231011183554-fea50d0b-thumbnail.jpg?width=640&height=640&fit=bounds)












