Le document couvre des concepts avancés en électricité industrielle, incluant les transformateurs et les moteurs asynchrones. Il détaille le fonctionnement, l'efficacité et le démarrage de ces machines, ainsi que les différents types de moteurs et leur utilisation. De plus, il aborde les systèmes de protection et de commande liés aux circuits électriques.


























































































![121
Édition septembre 2014 Electricité industrielle 121
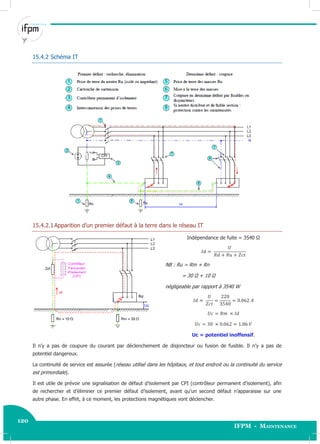
La recherche de défaut d’isolement en réseau IT est réalisée, en injectant entre le réseau et la terre un signal
de 10 kHz. Si une fuite existe, le signal passera par cette phase et la terre.
Il suffit de suivre cette phase avec un fréquencemètre spécialement conçu pour trouver l’endroit du défaut.
15.4.2.2Apparition d’un deuxième défaut à la terre dans le réseau IT
UBJ = tension au niveau du jeu de barres alimentant les deux départs en défaut
UBJ = Zd x Id (impédance de la boucle ABCDEFGHJK multiplié par le courant de défaut)
UBJ = 380 V
Uc = tension de contact = UGD
15.4.2.3Calcul approché de la tension de contact Uc
Zd = Impédance de la boucle ABCDEFGHJK, en négligeant la réactance on a :
Zd = 2 (Résistance BC+ résistance HJ)
pour un courant de court-circuit (la température augmenten de plus de 25°C)
[( ) ( )]
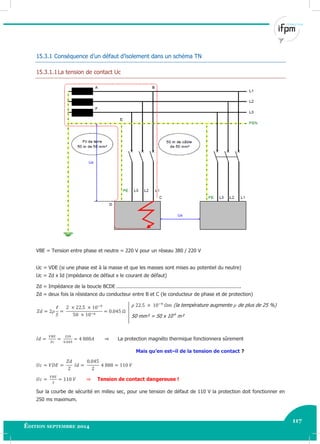
La protection magnéto-thermique fonctionnera sûrement !
Mais qu’en est-il de la tension de contact ?
Tension de contact dangereuse !
Sur la courbe de sécurité en milieu sec, pour une tension de contact de 190 V la protection doit fonctionner en
moins de 70 ms.
Comme dans les réseaux TN, il faut calculer la longueur maximale des câbles.
L’apparition d’un deuxième défaut d’isolement nous replace dans des situations identiques :
Au schéma TT : lorsque les masses ne sont pas interconnectées
Au schéma TN : lorsque les masses sont interconnectées](https://image.slidesharecdn.com/maintenance-electricite-industrielle-print1-191130105255/85/Maintenance-electricite-industrielle-www-cours-online-com-129-320.jpg)




![129
Édition septembre 2014
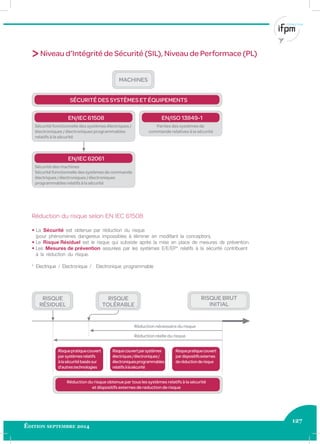
Niveau de
performance
requis (PLr)
Pointdedépart
pourévaluer
lacontribution
d'unefonction
desécuritéà
laréduction
derisque
Niveau de
performance (PL)
a
b
c
d
e
≥ 10-5
... < 10-4
≥ 3 x 10-6
... <10-5
≥ 10-6
…< 3 x 10-6
≥ 10-7
…< 10-6
≥ 10-8
…< 10-7
Probabilité de défaillances
dangereuses par heure
Niveaudeperformance“EN/ISO13849-1”
Niveaud'intégritédeSécurité“EN/IEC62061”
Niveaudecatégoriedesécuritéselon“EN/ISO13849-1”
Cat. B
CDmoy =
0
MTTFd
pour un seul canal = faible
MTTFd
pour un seul canal = moyen
MTTFd
pour un seul canal = élevé
Cat. 4
CDmoy =
élevé
Cat. 3
CDmoy =
moyen
Cat. 3
CDmoy =
faible
Cat. 2
CDmoy =
moyenne
Cat. 2
CDmoy =
faible
Cat. 1
CDmoy =
faible
Composants électromécaniques
BoutonArrêtd'urgenceØ22mmXB4&XB5(«coupdepoing»)
Arrêtsd'urgenceàcommandeparcâbleXY2C
BoutonpoussoirØ22mmXB4&XB5
Interrupteursdepositiondesécurité,têteàpoussoiroulevieràgaletXCS
Interrupteursdesécuritéàclé-languette(pourprotecteursmobiles)XCS
Interrupteursdesécuritéàclé-languette(àinterverrouillageparélectro-aimant)XCS
InterrupteursdesécuritéàlevieretàaxerotatifXCS
InterrupteursdesécuritémagnétiquescodésXCSDMC/DMP/DMRà10mA
Contacteursavecchargenominale
Contacteursavecchargemécanique
1 500 000
50 000
25 000 000
50 000 000
5 000 000
5 000 000
5 000 000
50 000 000
1 300 000
20 000 000
B10d
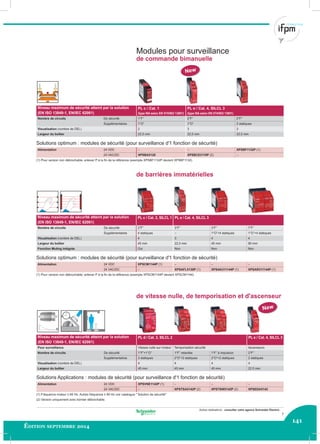
>Approche selon EN ISO 13849-1
Détermination du niveau PL requis (PLr)
Cette détermination est faite à l’aide du graphique de risque ci dessous
S = Sévérité des lésions
S1 = Lésions légères (normalement réversibles)
S2 = Lésions sérieuses (normalement irréversibles) ou mort d’une personne.
F = Fréquence et/ou durée d’exposition
F1 = Rare à peu fréquente et/ou durée d’exposition courte
F2 = Fréquente à continue et/ou durée d’exposition longue
P = Possibilité d’évitement du phénomène dangereux ou de
limitation d’un dommage
P1 = Possible dans certaines circonstances
P2 = Presque impossible
L = Faible contribution à la réduction des risques
H = Contribution importante à la réduction des risques
Détermination du niveau PL de la partie du système
de commande relative à la sécurité (SRP/CS)
Au regard de la norme EN ISO 13849-1, le niveau
de performance (PL) est associé à une valeur cible
de probabilité de défaillance dangereuse par heure
pour chaque fonction de commande relative à la sécurité.
Sécurité fonctionnelle et données de fiabilité
du constructeur pour les composants
électromécaniques, selon les normes
EN/ISO 13849-1 et EN/IEC 62061
Preventa, Harmony, Tesys -
Valeurs B10d des composants électromécaniques.
Les valeurs suivantes s’appliquent aux modes
opératoires à régime élevé ou continu utilisés
dans les applications machines.
La valeur B10 est donnée pour une durée de vie
de 20 ans, mais est surtout limitée par l’usure
mécanique ou l’usure des contacts.
Pour une SRP/CS (ou une combinaison
de SRP/CS) conçue selon les exigences de
l’article 6, le PL peut être estimé au moyen
de la figure ci contre après estimation de
plusieurs facteurs tels que structure maté-
rielle et logicielle du système (catégories),
étendue des mécanismes de détection des
défauts [couverture de diagnostique (DC)],
fiabilité des composants [temps moyens
avant défaillance dangereuse (MTTFd
),
défaillance de cause commune (CCF)]…](https://image.slidesharecdn.com/maintenance-electricite-industrielle-print1-191130105255/85/Maintenance-electricite-industrielle-www-cours-online-com-137-320.jpg)