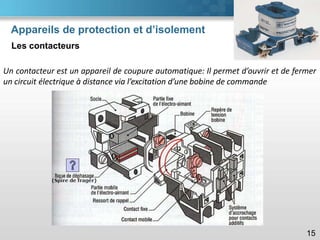
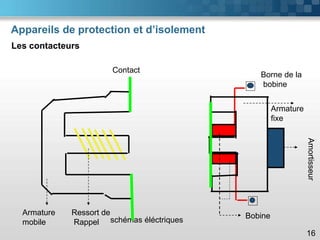
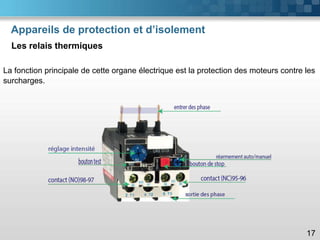
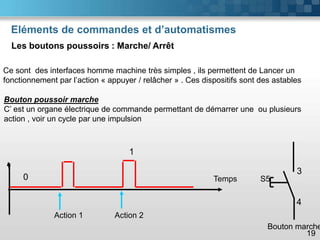
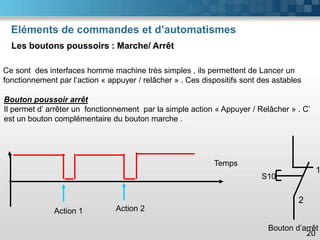
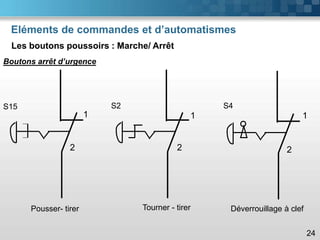
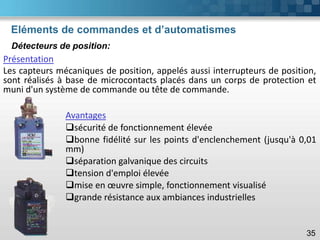
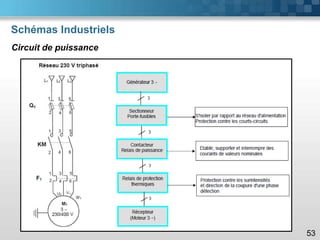
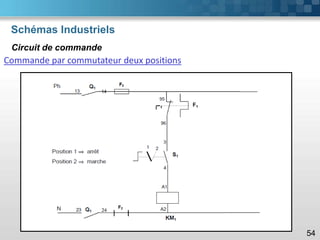
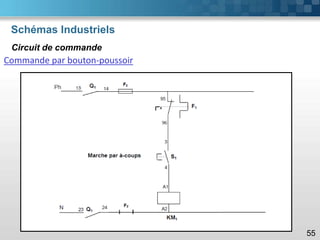
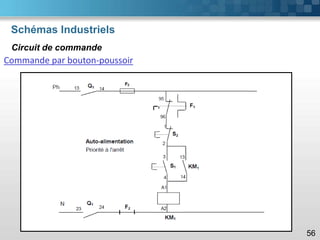
Le document traite des installations d'automatismes industriels, en les divisant en circuits de commande et de puissance, et décrit les composants essentiels tels que les appareils de protection, les interrupteurs, et les disjoncteurs. Il détaille également les éléments de commande, comme les boutons poussoirs et les relais, ainsi que divers types de capteurs utilisés pour la détection dans les systèmes automatisés. En outre, il fournit des informations sur les caractéristiques, les avantages et les inconvénients des dispositifs de sécurité électriques.