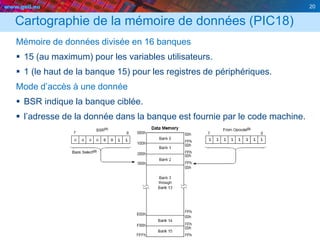
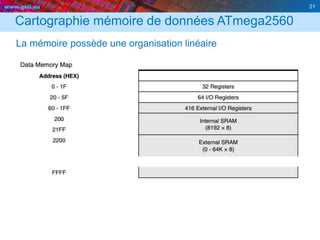
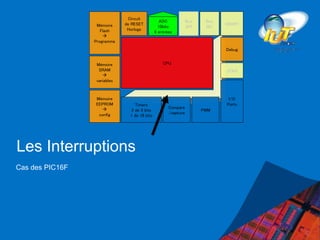
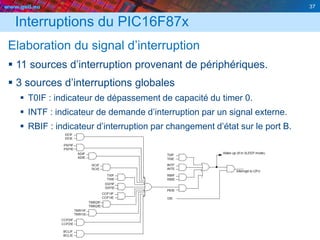
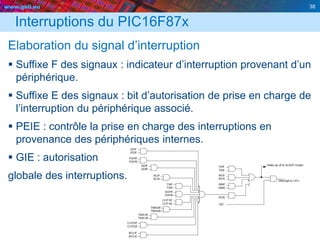
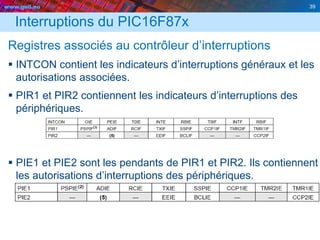
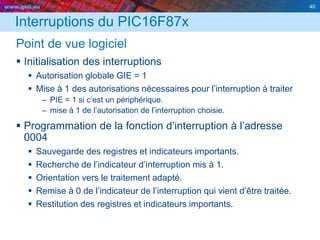
Le document traite des microcontrôleurs, en expliquant leurs caractéristiques, applications, choix, et aspects techniques tels que l'architecture mémoire et les dispositifs de reset. Il distingue entre microcontrôleurs et microprocesseurs, évoque les langages de développement, ainsi que les critères de choix pour un microcontrôleur. Les fonctionnalités et les types d'interruptions, ainsi que les dispositifs de protection tels que le chien de garde, sont également présentés.