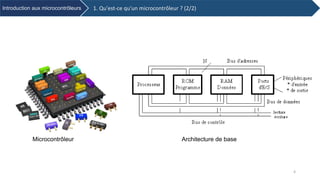
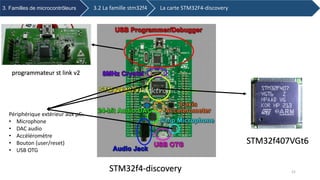
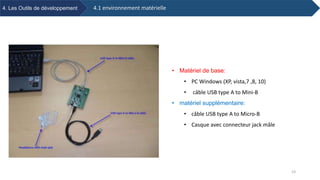
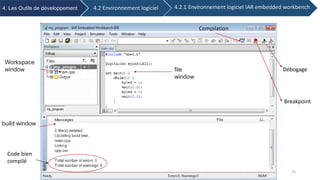
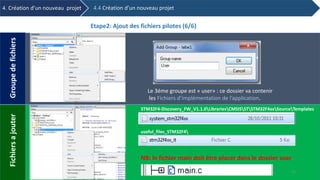
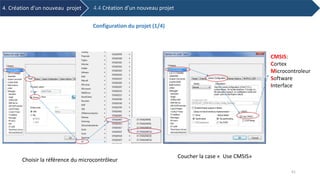
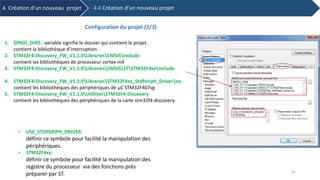
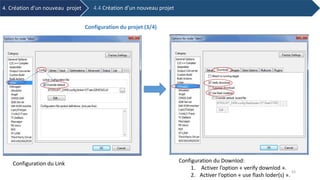
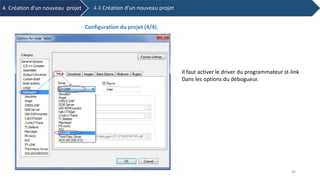
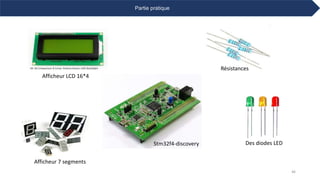
Le document présente une formation sur les microcontrôleurs, en se concentrant sur la famille STM32F4, en expliquant leur fonctionnement, caractéristique, et applications dans divers domaines tels que l'automobile et la domotique. Il aborde également les outils de développement comme IAR Embedded Workbench et décrit la création et la configuration de projets liés à un microcontrôleur STM32F4. Enfin, il détaille les étapes nécessaires pour programmer un circuit électronique à l'aide de la carte STM32F4-Discovery.