Ce document traite de la simulation d'un moteur à courant continu à l'aide de MATLAB/Simulink, en se basant sur des équations électriques et électromécaniques. Il explique le principe de modulation par largeur d'impulsions (PWM) pour contrôler la vitesse du moteur et les méthodes de commande associées. Enfin, il présente des résultats de simulation et des analyses des performances du moteur sous différentes conditions.

![𝑢( 𝑡) = 𝑅𝑖( 𝑡) + 𝐿
𝑑𝑖(𝑡)
𝑑(𝑡)
+ 𝐾𝑒. 𝜔𝑚(𝑡)
𝐽
𝑑( 𝜔𝑚)
𝑑𝑡
= 𝐶𝑚( 𝑡) − 𝐶𝑅( 𝑡) − 𝑓. 𝜔𝑚(𝑡)
Avec :
u(t) =Tensiondumoteur [V]
e(t) =Forcecontreélectromotrice dumoteur [V] i(t) =Intensité dansle moteur
[A]
Cm(t)=Coupleexercéparlemoteur [N.m]
Cr(t)=Couplerésistant surl’axemoteur [N.m]
ωm(t)=Vitesse angulairedumoteur [rad/s]
R = Valeur de la résistance [Ω]
L=Valeurdel’inductance [H]
Ke=Coefficient delaforce contreélectromotrice [V/(rad/s)] J=Inertie équivalente
ramenéesurl’arbre moteur [kg.m²]
f =0,01=Paramètrede«frottement fluide »total [N.m.s] Kt=Constantedecouple [N.m/A]
La tension d'induit va et le couple de charge Tch sont les entrées du modèle. Le courant
d'induit ia et la vitesse angulaire du rotor sont les sorties du modèle. Les paramètres du
moteur sont indiqués dans le tableau 1.
Un 600V
In 343A
n 2400tr/min
Tn 796N.m
Ra 0.05
La 0.005H
Kf 2.32Vs
J 100kgm3
D’après la loi des mailles
Equation de la dynamique de l’arbre moteur
e(t) = Ke.ωm(t) Equation de l’électromagnétisme
Cm(t) = Kt .i(t) Equation de l’électromagnétisme](https://image.slidesharecdn.com/matlabsimulinkpartie2-200306072042/85/Matlab-simulink-partie-2-3-320.jpg)




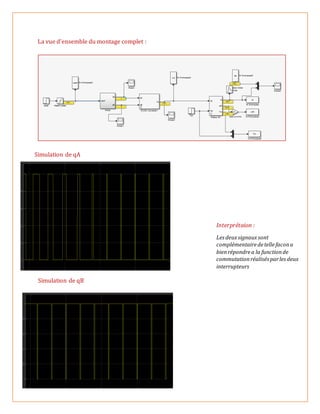
















































![[C elm][co]conversion electromecanique](https://cdn.slidesharecdn.com/ss_thumbnails/celmcoconversionelectromecanique-200227124318-thumbnail.jpg?width=640&height=640&fit=bounds)

























