Cours Motorisation et Commande de Machines AU2024-2025.pdf
1.
Cours Informatique Industrielle
CalculateursTemps Réel
Lotfi BOUSSAID 1
Cours Motorisation et Commandes des Machines
Année Universitaire 2024 - 2025
Email : LotfiBoussaid@yahoo.fr
Lotfi BOUSSAID
Maître de Conférences
Département de Génie Électrique
École Nationale d’Ingénieurs de Monastir
2.
Cours Informatique Industrielle
CalculateursTemps Réel
Lotfi BOUSSAID 2
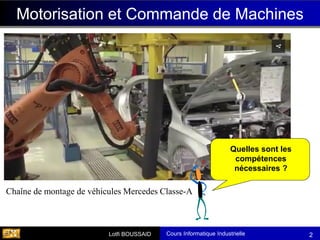
Motorisation et Commande de Machines
Motorisation et Commande de Machines
Chaîne de montage de véhicules Mercedes Classe-A
Quelles sont les
compétences
nécessaires ?
3.
Cours Informatique Industrielle
CalculateursTemps Réel
Lotfi BOUSSAID 3
Motorisation et Commande de Machines
Les Moteurs Électriques
I. Moteur à courant continu
1. Excitation série
2. Excitation séparée
3. Micromoteur
4. Servomoteur
5. Moteur Brushless
II. Moteur pas à pas
1. A aimant permanent
2. A réluctance variable
3. Hybride
III. Moteur Alternatif
1. Universel
2. Monophasé
3. Triphasé
4. Moteur Synchrone
Un petit moteur à courant continu
Motorisation et Commande de Machines
Les Moteurs Électriques
4.
Cours Informatique Industrielle
CalculateursTemps Réel
Lotfi BOUSSAID 4
Motorisation et Commande de Machines
Les Moteurs Électriques
Comment choisir le moteur adéquat
pour mon application ?
5.
Cours Informatique Industrielle
CalculateursTemps Réel
Lotfi BOUSSAID 5
Critères de choix d’un Moteur
- Couple et couple au démarrage
- Rendement
- Vitesse (constante ou variable)
- Coût
- Taille et poids (encombrement)
- Charge (Constante ou variable)
Motorisation et Commande de Machines
2. Critères spécifiques au Moteur
1. Critères dépendant de l’application
- Application de puissance (électropompes, traction, etc.)
- Application embarquée (alimentée par batterie)
- Application à vitesse constante
- Application à couple important au démarrage
- Application grand public (Machine à laver, Chyniol, électroménager, etc.)
- Application de précision
- Application de modélisme
6.
Cours Informatique Industrielle
CalculateursTemps Réel
Lotfi BOUSSAID 6
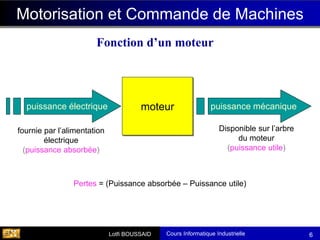
Fonction d’un moteur
moteur
puissance électrique puissance mécanique
fournie par l’alimentation
électrique
(puissance absorbée)
Disponible sur l’arbre
du moteur
(puissance utile)
Pertes = (Puissance absorbée – Puissance utile)
Motorisation et Commande de Machines
7.
Cours Informatique Industrielle
CalculateursTemps Réel
Lotfi BOUSSAID 7
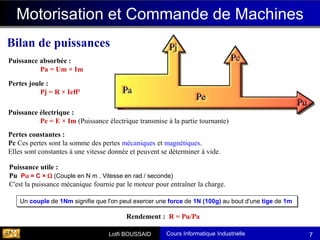
Rendement : R = Pu/Pa
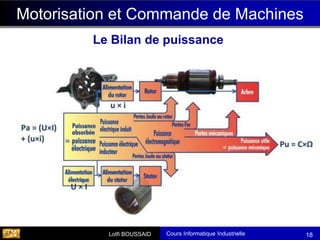
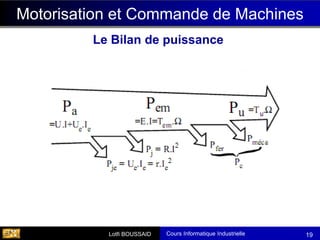
Bilan de puissances
Motorisation et Commande de Machines
Puissance absorbée :
Pa = Um × Im
Pertes joule :
Pj = R × Ieff²
Puissance électrique :
Pe = E × Im (Puissance électrique transmise à la partie tournante)
Puissance utile :
Pu Pu = C × (Couple en N m . Vitesse en rad / seconde)
C'est la puissance mécanique fournie par le moteur pour entraîner la charge.
Pertes constantes :
Pc Ces pertes sont la somme des pertes mécaniques et magnétiques.
Elles sont constantes à une vitesse donnée et peuvent se déterminer à vide.
Un couple de 1Nm signifie que l'on peut exercer une force de 1N (100g) au bout d'une tige de 1m
8.
Cours Informatique Industrielle
CalculateursTemps Réel
Lotfi BOUSSAID 8
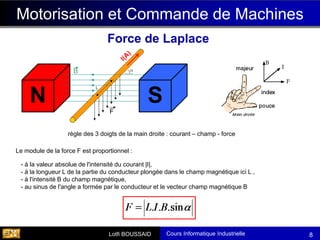
Force de Laplace
règle des 3 doigts de la main droite : courant – champ - force
Motorisation et Commande de Machines
- à la valeur absolue de l'intensité du courant |I|,
- à la longueur L de la partie du conducteur plongée dans le champ magnétique ici L ,
- à l'intensité B du champ magnétique,
- au sinus de l'angle a formée par le conducteur et le vecteur champ magnétique B
Le module de la force F est proportionnel :
9.
Cours Informatique Industrielle
CalculateursTemps Réel
Lotfi BOUSSAID 9
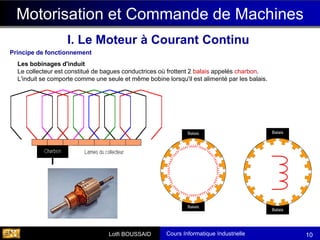
I. Le Moteur à Courant Continu
Motorisation et Commande de Machines
Lorsque les conducteurs sont parcourus par un courant, ils sont soumis à des forces F1 et F2 qui tendent
à faire tourner le rotor. Le collecteur permet d'inverser le sens du courant dans les conducteurs lorsque
ceux-ci passent le plan vertical. Ainsi le sens du couple des forces F1 et F2 et donc le sens de rotation du
moteur est conservé.
Principe de fonctionnement
10.
Cours Informatique Industrielle
CalculateursTemps Réel
Lotfi BOUSSAID 10
Motorisation et Commande de Machines
Les bobinages d'induit
Le collecteur est constitué de bagues conductrices où frottent 2 balais appelés charbon.
L'induit se comporte comme une seule et même bobine lorsqu'il est alimenté par les balais.
Balais
Balais
Balais
Balais
Principe de fonctionnement
I. Le Moteur à Courant Continu
11.
Cours Informatique Industrielle
CalculateursTemps Réel
Lotfi BOUSSAID 11
Motorisation et Commande de Machines
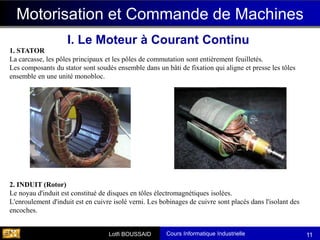
1. STATOR
La carcasse, les pôles principaux et les pôles de commutation sont entièrement feuilletés.
Les composants du stator sont soudés ensemble dans un bâti de fixation qui aligne et presse les tôles
ensemble en une unité monobloc.
2. INDUIT (Rotor)
Le noyau d'induit est constitué de disques en tôles électromagnétiques isolées.
L'enroulement d'induit est en cuivre isolé verni. Les bobinages de cuivre sont placés dans l'isolant des
encoches.
I. Le Moteur à Courant Continu
12.
Cours Informatique Industrielle
CalculateursTemps Réel
Lotfi BOUSSAID 12
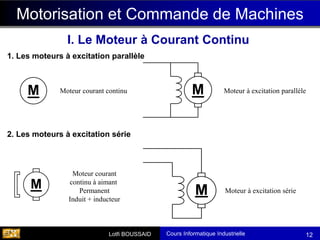
2. Les moteurs à excitation série
M
M
Moteur courant
continu à aimant
Permanent
Induit + inducteur
Moteur courant continu
Moteur à excitation série
Moteur à excitation parallèle
M
M
Motorisation et Commande de Machines
I. Le Moteur à Courant Continu
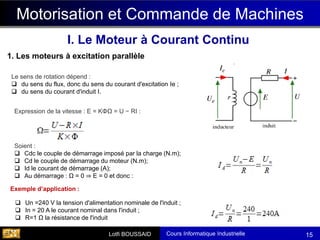
1. Les moteurs à excitation parallèle
13.
Cours Informatique Industrielle
CalculateursTemps Réel
Lotfi BOUSSAID 13
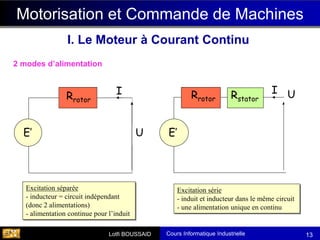
2 modes d’alimentation
Excitation séparée
- inducteur = circuit indépendant
(donc 2 alimentations)
- alimentation continue pour l’induit
Excitation série
- induit et inducteur dans le même circuit
- une alimentation unique en continu
U
E’
I
Rrotor
U
Rstator
E’
I
Rrotor
Motorisation et Commande de Machines
I. Le Moteur à Courant Continu
14.
Cours Informatique Industrielle
CalculateursTemps Réel
Lotfi BOUSSAID 14
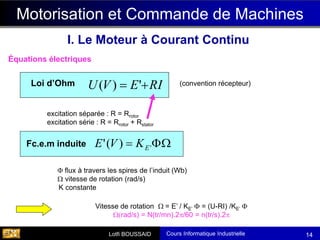
Équations électriques
Fc.e.m induite
RI
E
V
U +
= '
)
(
= '
)
(
' E
K
V
E
excitation séparée : R = Rrotor
excitation série : R = Rrotor + Rstator
flux à travers les spires de l’induit (Wb)
vitesse de rotation (rad/s)
K constante
(convention récepteur)
Vitesse de rotation = E’ / KE’ = (U-RI) /KE’
(rad/s) = N(tr/mn).2/60 = n(tr/s).2
Loi d’Ohm
Motorisation et Commande de Machines
I. Le Moteur à Courant Continu
15.
Cours Informatique Industrielle
CalculateursTemps Réel
Lotfi BOUSSAID 15
Motorisation et Commande de Machines
I. Le Moteur à Courant Continu
1. Les moteurs à excitation parallèle
Le sens de rotation dépend :
❑ du sens du flux, donc du sens du courant d'excitation Ie ;
❑ du sens du courant d'induit I.
Expression de la vitesse : E = KΦΩ = U − RI :
Soient :
❑ Cdc le couple de démarrage imposé par la charge (N.m);
❑ Cd le couple de démarrage du moteur (N.m);
❑ Id le courant de démarrage (A);
❑ Au démarrage : Ω = 0 ⇒ E = 0 et donc :
❑ Un =240 V la tension d'alimentation nominale de l'induit ;
❑ In = 20 A le courant nominal dans l'induit ;
❑ R=1 Ω la résistance de l'induit
Exemple d’application :
16.
Cours Informatique Industrielle
CalculateursTemps Réel
Lotfi BOUSSAID 16
Motorisation et Commande de Machines
I. Le Moteur à Courant Continu
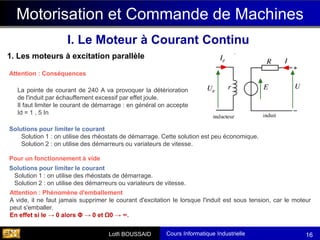
1. Les moteurs à excitation parallèle
La pointe de courant de 240 A va provoquer la détérioration
de l'induit par échauffement excessif par effet joule.
Il faut limiter le courant de démarrage : en général on accepte
Id = 1 , 5 In
Attention : Conséquences
Solutions pour limiter le courant
Solution 1 : on utilise des rhéostats de démarrage. Cette solution est peu économique.
Solution 2 : on utilise des démarreurs ou variateurs de vitesse.
Solutions pour limiter le courant
Solution 1 : on utilise des rhéostats de démarrage.
Solution 2 : on utilise des démarreurs ou variateurs de vitesse.
Pour un fonctionnement à vide
Attention : Phénomène d'emballement
A vide, il ne faut jamais supprimer le courant d'excitation Ie lorsque l'induit est sous tension, car le moteur
peut s'emballer.
En effet si Ie → 0 alors Φ → 0 et Ω0 → ∞.
17.
Cours Informatique Industrielle
CalculateursTemps Réel
Lotfi BOUSSAID 17
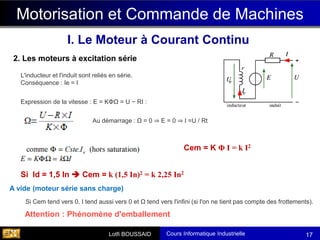
2. Les moteurs à excitation série
Motorisation et Commande de Machines
I. Le Moteur à Courant Continu
L'inducteur et l'induit sont reliés en série.
Conséquence : Ie = I
Expression de la vitesse : E = KΦΩ = U − RI :
Au démarrage : Ω = 0 ⇒ E = 0 ⇒ I =U / Rt
Cem = K Φ I = k I2
Si Id = 1,5 In ➔ Cem = k (1,5 In)2 = k 2,25 In2
Si Cem tend vers 0, I tend aussi vers 0 et Ω tend vers l'infini (si l'on ne tient pas compte des frottements).
Attention : Phénomène d'emballement
A vide (moteur série sans charge)
Cours Informatique Industrielle
CalculateursTemps Réel
Lotfi BOUSSAID 20
Relation Puissance - Couple
P = C .
Watts = (N.m) . (Rad/s)
A tout terme de puissance on peut donc associer un couple
Motorisation et Commande de Machines
Puissance = Couple . Vitesse
I. Le Moteur à Courant Continu
21.
Cours Informatique Industrielle
CalculateursTemps Réel
Lotfi BOUSSAID 21
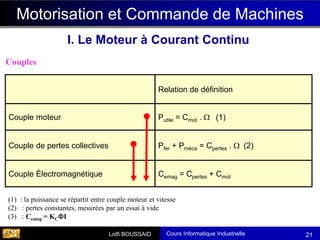
Couples
Relation de définition
Couple moteur Putile = Cmot . (1)
Couple de pertes collectives Pfer + Pméca = Cpertes . (2)
Couple Électromagnétique Cemag = Cpertes + Cmot
(1) : la puissance se répartit entre couple moteur et vitesse
(2) : pertes constantes, mesurées par un essai à vide
(3) : Cemag = KCI
Motorisation et Commande de Machines
I. Le Moteur à Courant Continu
22.
Cours Informatique Industrielle
CalculateursTemps Réel
Lotfi BOUSSAID 22
Rendement
- inducteur bobiné
pertes dans le circuit inducteur
absorbée
utile
P
P
=
inducteur
J
mot
P
UI
C
+
=
UI
Cmot
=
➢ Définition générale
Moteur à excitation séparée :
- inducteur à aimant permanent
pas de pertes dans le circuit inducteur
Motorisation et Commande de Machines
UI
Cmot
=
Moteur à excitation série
I. Le Moteur à Courant Continu
23.
Cours Informatique Industrielle
CalculateursTemps Réel
Lotfi BOUSSAID 23
Motorisation et Commande de Machines
I. Le Moteur à Courant Continu
Applications
- Applications nécessitant un couple de démarrage important
- Couple / vitesse de pente importante
- Applications pouvant être alimenté par batterie
- Applications fonctionnant à vitesse constante
Avantages :
- Coût relativement élevé pour des puissances importantes
- Usure du système collecteur / charbons
- Régulation de vitesse plus facile
- Rendement relativement élevé
Inconvénients :
Utilisation :
- Moteurs à excitation parallèles : Pompes hydrauliques, Ventilateurs, etc.
- Moteurs à excitation série : (gros couple au démarrage et faible vitesse)
démarreurs d'automobiles, traction (locomotives), métro, etc.
Choix du moteur :
- Vitesse de 1000 à 5000 tr/mn ➔ Moteur direct
- Vitesse < 500 tr/mn ➔ Moteur à réducteur de vitesse
- Pu (w) = (2π/60) C(N.m) N(tr/mn)
Puissance utile :
24.
Cours Informatique Industrielle
CalculateursTemps Réel
Lotfi BOUSSAID 24
Motorisation et Commande de Machines
Exercice :
Réponse :
Un moteur à excitation indépendante actionne un monte-charge. Il soulève une masse de deux
tonnes à la vitesse d’un mètre par seconde. Le moteur est alimenté sous 1500 V, sa résistance
d’induit est de 1,6 , le rendement de l’ensemble du système est de 70 % (on négligera les
pertes du stator).
Calculer la puissance absorbée par le moteur ainsi que le courant appelé lors de la montée.
Puissance utile fournie par le moteur : P = M . g . v
Puissance utile fournie par le moteur : P = M . g . v
P W
u = =
2 10 9 8 1 19600
3
,
Puissance absorbée par le moteur P
P
W
u
= =
0 7
28000
,
P = UI = = =
I
P
U
A
28000
1500
18 7
,
I. Le Moteur à Courant Continu
25.
Cours Informatique Industrielle
CalculateursTemps Réel
Lotfi BOUSSAID 25
Motorisation et Commande de Machines
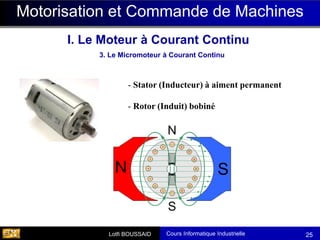
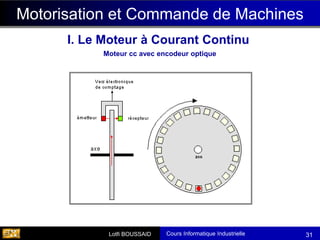
3. Le Micromoteur à Courant Continu
Un petit moteur à courant continu
- Stator (Inducteur) à aiment permanent
- Rotor (Induit) bobiné
I. Le Moteur à Courant Continu
26.
Cours Informatique Industrielle
CalculateursTemps Réel
Lotfi BOUSSAID 26
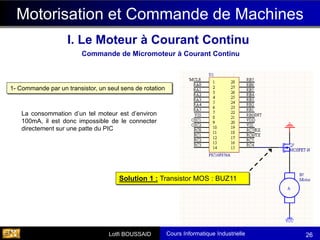
Solution 1 : Transistor MOS : BUZ11
La consommation d’un tel moteur est d’environ
100mA, il est donc impossible de le connecter
directement sur une patte du PIC
1- Commande par un transistor, un seul sens de rotation
Motorisation et Commande de Machines
Commande de Micromoteur à Courant Continu
I. Le Moteur à Courant Continu
27.
Cours Informatique Industrielle
CalculateursTemps Réel
Lotfi BOUSSAID 27
Motorisation et Commande de Machines
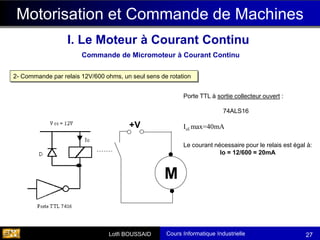
2- Commande par relais 12V/600 ohms, un seul sens de rotation
Porte TTL à sortie collecteur ouvert :
74ALS16
Iol max=40mA
Le courant nécessaire pour le relais est égal à:
Io = 12/600 = 20mA
M
+V
Commande de Micromoteur à Courant Continu
I. Le Moteur à Courant Continu
28.
Cours Informatique Industrielle
CalculateursTemps Réel
Lotfi BOUSSAID 28
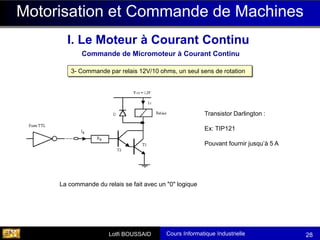
3- Commande par relais 12V/10 ohms, un seul sens de rotation
La commande du relais se fait avec un "0" logique
Transistor Darlington :
Ex: TIP121
Pouvant fournir jusqu’à 5 A
Motorisation et Commande de Machines
Commande de Micromoteur à Courant Continu
I. Le Moteur à Courant Continu
29.
Cours Informatique Industrielle
CalculateursTemps Réel
Lotfi BOUSSAID 29
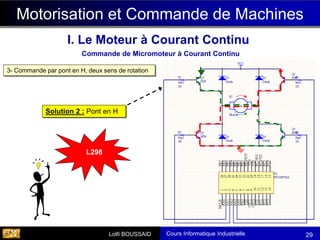
Solution 2 : Pont en H
L298
Motorisation et Commande de Machines
Commande de Micromoteur à Courant Continu
3- Commande par pont en H, deux sens de rotation
I. Le Moteur à Courant Continu
30.
Cours Informatique Industrielle
CalculateursTemps Réel
Lotfi BOUSSAID 30
Motorisation et Commande de Machines
Applications à base de Micromoteur à Courant Continu
I. Le Moteur à Courant Continu
- Robotique
- Modélisme
- Applications à encombrement minimum
- Applications portables (ex: mini-perceuses)
- Informatique stockage de données
- les télécoms (portables, satellites, les câblages et relais...)
- Domaine médicale ((prothèses et greffes, endoscopie, instruments chirurgicaux...)
- Micro-outillage
Cours Informatique Industrielle
CalculateursTemps Réel
Lotfi BOUSSAID 32
4. Le Servomoteur
Motorisation et Commande de Machines
I. Le Moteur à Courant Continu
- Un servomoteur est un moteur conçu pour générer le mouvement précis d'un élément mécanique
selon une commande externe.
- Un servomoteur est un système motorisé capable d'atteindre des positions prédéterminées, puis de
les maintenir.
- La position est : dans le cas d’un moteur rotatif, une position d'angle et, dans le cas d’un moteur
linéaire une position de distance.
Définition :
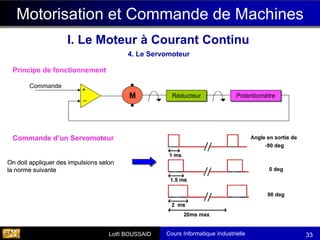
Le servomoteur est constitué d’un moteur à courant continu relié à un réducteur, et asservit par un
potentiomètre et un circuit de contrôle
Constitution d’un servomoteur :
33.
Cours Informatique Industrielle
CalculateursTemps Réel
Lotfi BOUSSAID 33
Motorisation et Commande de Machines
Réducteur
M Potentiomètre
Commande
+
_
Principe de fonctionnement
I. Le Moteur à Courant Continu
On doit appliquer des impulsions selon
la norme suivante
Commande d’un Servomoteur
On doit appliquer des impulsions selon
la norme suivante
Commande d’un Servomoteur
On doit appliquer des impulsions selon
la norme suivante
Commande d’un Servomoteur
4. Le Servomoteur
34.
Cours Informatique Industrielle
CalculateursTemps Réel
Lotfi BOUSSAID 34
Motorisation et Commande de Machines
I. Le Moteur à Courant Continu
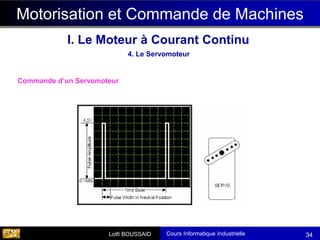
Commande d’un Servomoteur
4. Le Servomoteur
Pwm
35.
Cours Informatique Industrielle
CalculateursTemps Réel
Lotfi BOUSSAID 35
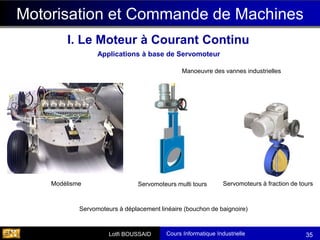
Applications à base de Servomoteur
Motorisation et Commande de Machines
I. Le Moteur à Courant Continu
Servomoteurs à déplacement linéaire (bouchon de baignoire)
Servomoteur électrique monté sur un tablier d'un robinet-vanne
Servomoteur électrique "fraction de tour" monté sur une vanne papillon
Servomoteurs multi tours Servomoteurs à fraction de tours
Modélisme
Manoeuvre des vannes industrielles
36.
Cours Informatique Industrielle
CalculateursTemps Réel
Lotfi BOUSSAID 36
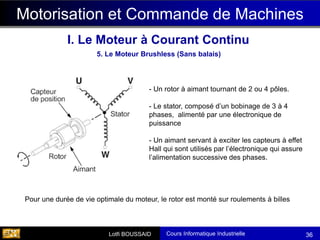
5. Le Moteur Brushless (Sans balais)
Motorisation et Commande de Machines
I. Le Moteur à Courant Continu
- Un rotor à aimant tournant de 2 ou 4 pôles.
- Le stator, composé d’un bobinage de 3 à 4
phases, alimenté par une électronique de
puissance
- Un aimant servant à exciter les capteurs à effet
Hall qui sont utilisés par l’électronique qui assure
l’alimentation successive des phases.
Pour une durée de vie optimale du moteur, le rotor est monté sur roulements à billes
37.
Cours Informatique Industrielle
CalculateursTemps Réel
Lotfi BOUSSAID 37
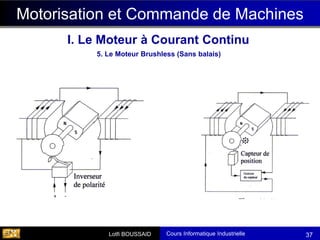
5. Le Moteur Brushless (Sans balais)
Motorisation et Commande de Machines
I. Le Moteur à Courant Continu
38.
Cours Informatique Industrielle
CalculateursTemps Réel
Lotfi BOUSSAID 38
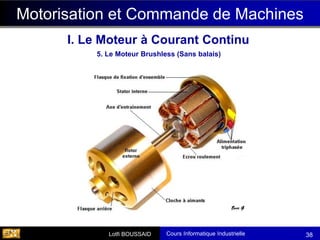
5. Le Moteur Brushless (Sans balais)
Motorisation et Commande de Machines
I. Le Moteur à Courant Continu
39.
Cours Informatique Industrielle
CalculateursTemps Réel
Lotfi BOUSSAID 39
- Longues durées de vie
- Vitesses élevées,
- Fonctionnements en conditions d’utilisation difficiles.
- Industrie Automobile
- Applications industrielles
- Modélisme
5. Le Moteur Brushless (Sans balais)
Motorisation et Commande de Machines
I. Le Moteur à Courant Continu
Les moteurs Brushless sont particulièrement adaptée à des applications nécessitant :
40.
Cours Informatique Industrielle
CalculateursTemps Réel
Lotfi BOUSSAID 40
Motorisation et Commande de Machines
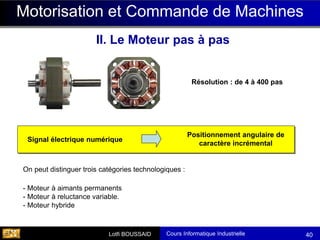
II. Le Moteur pas à pas
Positionnement angulaire de
caractère incrémental
Signal électrique numérique
- Moteur à aimants permanents
- Moteur à reluctance variable.
- Moteur hybride
On peut distinguer trois catégories technologiques :
Résolution : de 4 à 400 pas
41.
Cours Informatique Industrielle
CalculateursTemps Réel
Lotfi BOUSSAID 41
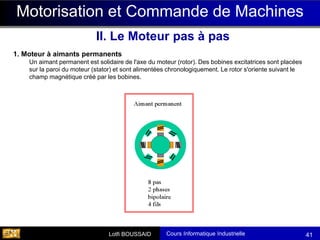
1. Moteur à aimants permanents
Un aimant permanent est solidaire de l'axe du moteur (rotor). Des bobines excitatrices sont placées
sur la paroi du moteur (stator) et sont alimentées chronologiquement. Le rotor s'oriente suivant le
champ magnétique créé par les bobines.
Motorisation et Commande de Machines
II. Le Moteur pas à pas
42.
Cours Informatique Industrielle
CalculateursTemps Réel
Lotfi BOUSSAID 42
Motorisation et Commande de Machines
II. Le Moteur pas à pas
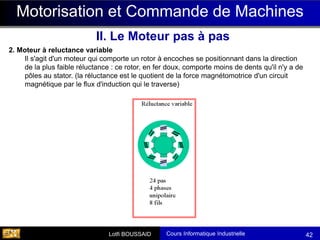
2. Moteur à reluctance variable
Il s'agit d'un moteur qui comporte un rotor à encoches se positionnant dans la direction
de la plus faible réluctance : ce rotor, en fer doux, comporte moins de dents qu'il n'y a de
pôles au stator. (la réluctance est le quotient de la force magnétomotrice d'un circuit
magnétique par le flux d'induction qui le traverse)
43.
Cours Informatique Industrielle
CalculateursTemps Réel
Lotfi BOUSSAID 43
Motorisation et Commande de Machines
II. Le Moteur pas à pas
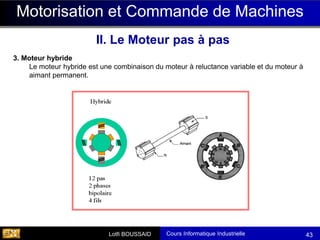
3. Moteur hybride
Le moteur hybride est une combinaison du moteur à reluctance variable et du moteur à
aimant permanent.
44.
Cours Informatique Industrielle
CalculateursTemps Réel
Lotfi BOUSSAID 44
Motorisation et Commande de Machines
II. Le Moteur pas à pas
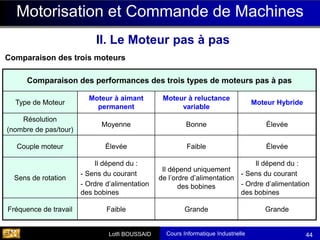
Comparaison des trois moteurs
Comparaison des performances des trois types de moteurs pas à pas
Type de Moteur
Moteur à aimant
permanent
Moteur à reluctance
variable
Moteur Hybride
Résolution
(nombre de pas/tour)
Moyenne Bonne Élevée
Couple moteur Élevée Faible Élevée
Sens de rotation
Il dépend du :
- Sens du courant
- Ordre d’alimentation
des bobines
Il dépend uniquement
de l’ordre d’alimentation
des bobines
Il dépend du :
- Sens du courant
- Ordre d’alimentation
des bobines
Fréquence de travail Faible Grande Grande
Cours Informatique Industrielle
CalculateursTemps Réel
Lotfi BOUSSAID 47
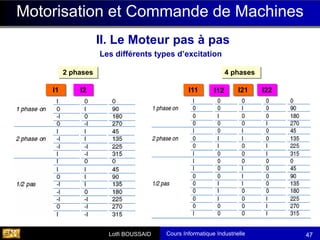
Motorisation et Commande de Machines
Les différents types d’excitation
II. Le Moteur pas à pas
2 phases 4 phases
I1 I2 I11 I12 I21 I22
48.
Cours Informatique Industrielle
CalculateursTemps Réel
Lotfi BOUSSAID 48
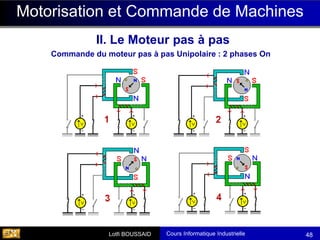
Motorisation et Commande de Machines
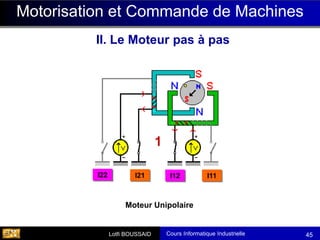
Commande du moteur pas à pas Unipolaire : 2 phases On
II. Le Moteur pas à pas
49.
Cours Informatique Industrielle
CalculateursTemps Réel
Lotfi BOUSSAID 49
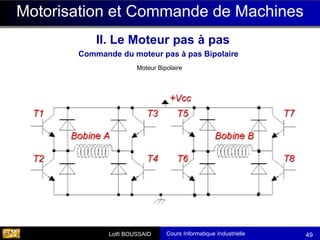
Motorisation et Commande de Machines
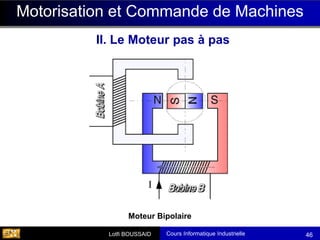
Moteur Bipolaire
II. Le Moteur pas à pas
Commande du moteur pas à pas Bipolaire
50.
Cours Informatique Industrielle
CalculateursTemps Réel
Lotfi BOUSSAID 50
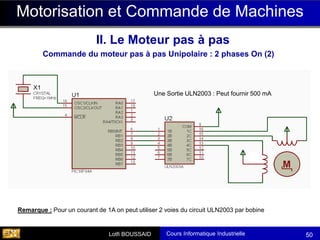
Motorisation et Commande de Machines
Une Sortie ULN2003 : Peut fournir 500 mA
Commande du moteur pas à pas Unipolaire : 2 phases On (2)
II. Le Moteur pas à pas
Remarque : Pour un courant de 1A on peut utiliser 2 voies du circuit ULN2003 par bobine
51.
Cours Informatique Industrielle
CalculateursTemps Réel
Lotfi BOUSSAID 51
Motorisation et Commande de Machines
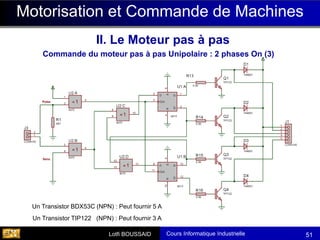
Un Transistor BDX53C (NPN) : Peut fournir 5 A
II. Le Moteur pas à pas
Commande du moteur pas à pas Unipolaire : 2 phases On (3)
Un Transistor TIP122 (NPN) : Peut fournir 3 A
52.
Cours Informatique Industrielle
CalculateursTemps Réel
Lotfi BOUSSAID 52
Motorisation et Commande de Machines
II. Le Moteur pas à pas
Applications
1- Moteur pas à pas à aimant permanent :
- Faible coût
- Peu d’inertie
- Applications : périphériques d’ordinateurs, positionnement de tête d’impression d’imprimantes, etc.
2- Moteur pas à pas à réluctance variable :
- Faible couple (torque)
- Applications de petites tailles : Table de micro-positionnement
3- Moteur pas à pas hybride :
- Meilleure résolution
- Couple (torque) plus important
- Applications : positionnement avec couple important
Les photocopieurs, imprimantes bancaires, périphériques informatiques, tables traçantes, instrumentation,
pompes médicales, pousses seringues, automobiles, climatisation, régulation, etc.
Sans balais, Fonctionnement en boucle ouverte et plusieurs pas angulaires sont disponibles
53.
Cours Informatique Industrielle
CalculateursTemps Réel
Lotfi BOUSSAID 53
Motorisation et Commande de Machines
III. Le Moteur Alternatif
1. Le Moteur Universel
- Un moteur universel peut être alimenté par une F.E.M alternative ou continue
- Moteur de perceuse, aspirateur, robot ménager etc...(appareils électroportatifs en général).
- En général, il est utilisé pour les appareils ne demandant qu'un couple modéré
54.
Cours Informatique Industrielle
CalculateursTemps Réel
Lotfi BOUSSAID 54
Motorisation et Commande de Machines
III. Le Moteur Alternatif
1. Le Moteur Universel
- Stator et rotor sont montés en série et alimentés en alternatif ou en continu
- Le rotor comporte plusieurs bobinages, alimentés successivement par les lames du
collecteur qui se trouvent au contact des balais.
- L’alimentation du stator crée un champ qui tend à attirer celui du rotor. En alternatif, quand le
courant s’inverse, le champ magnétique résultant s’inverse aussi bien dans le stator que dans
le rotor qui sont alimentés en série.
- Le collecteur provoque une succession d'alimentations puis de coupures des bobinages du
rotor : Il en résulte l’apparition d’étincelle
55.
Cours Informatique Industrielle
CalculateursTemps Réel
Lotfi BOUSSAID 55
Motorisation et Commande de Machines
III. Le Moteur Alternatif
2. Le Moteur Asynchrone Monophasé
- Stator portant un bobinage à p paires de pôles
- Rotor à cage d'écureuil en court circuit
A l'arrêt, le rotor est sollicité par deux champs tournant en sens inverse
Ce moteur ne démarre donc pas spontanément
56.
Cours Informatique Industrielle
CalculateursTemps Réel
Lotfi BOUSSAID 56
Motorisation et Commande de Machines
III. Le Moteur Alternatif
2. Le Moteur Asynchrone Monophasé
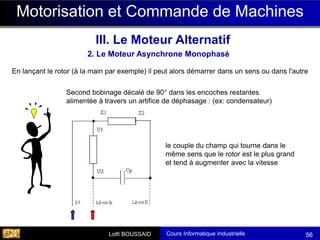
En lançant le rotor (à la main par exemple) il peut alors démarrer dans un sens ou dans l'autre
Second bobinage décalé de 90° dans les encoches restantes
alimentée à travers un artifice de déphasage : (ex: condensateur)
le couple du champ qui tourne dans le
même sens que le rotor est le plus grand
et tend à augmenter avec la vitesse
57.
Cours Informatique Industrielle
CalculateursTemps Réel
Lotfi BOUSSAID 57
Motorisation et Commande de Machines
III. Le Moteur Alternatif
2. Le Moteur Asynchrone Monophasé
La vitesse de synchronisme : Nsyn (tr/min) = ( 60.f ) / p
La vitesse du rotor N (tr/min) = [ ( 60.f ) / p ] (1-g)
- Plusieurs types de moteurs monophasés existent :
• Moteur à induction avec condensateur
• Moteur à induction sans condensateur
- Faible puissance, faible couple au démarrage, décrochage possible en cas de charge
- Fonctionnement intermittent : Électroménager, commande de vanne, pompes
Applications :
58.
Cours Informatique Industrielle
CalculateursTemps Réel
Lotfi BOUSSAID 58
Motorisation et Commande de Machines
III. Le Moteur Alternatif
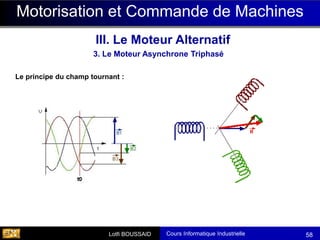
3. Le Moteur Asynchrone Triphasé
Le principe du champ tournant :
59.
Cours Informatique Industrielle
CalculateursTemps Réel
Lotfi BOUSSAID 59
Motorisation et Commande de Machines
III. Le Moteur Alternatif
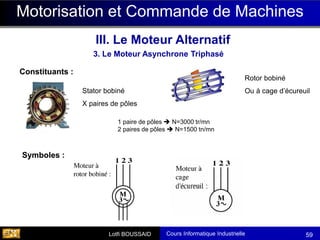
3. Le Moteur Asynchrone Triphasé
Stator bobiné
X paires de pôles
Rotor bobiné
Ou à cage d’écureuil
Symboles :
Constituants :
1 paire de pôles ➔ N=3000 tr/mn
2 paires de pôles ➔ N=1500 tn/mn
Symboles :
Constituants :
60.
Cours Informatique Industrielle
CalculateursTemps Réel
Lotfi BOUSSAID 60
Motorisation et Commande de Machines
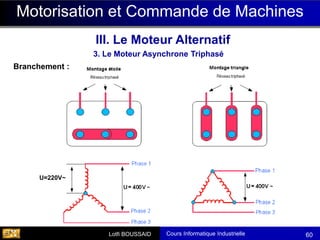
Branchement :
U=220V~
III. Le Moteur Alternatif
3. Le Moteur Asynchrone Triphasé
61.
Cours Informatique Industrielle
CalculateursTemps Réel
Lotfi BOUSSAID 61
Motorisation et Commande de Machines
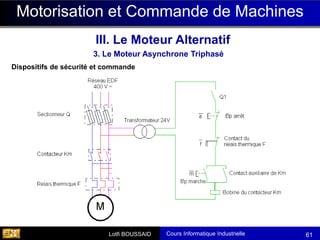
Dispositifs de sécurité et commande
III. Le Moteur Alternatif
3. Le Moteur Asynchrone Triphasé
62.
Cours Informatique Industrielle
CalculateursTemps Réel
Lotfi BOUSSAID 62
Motorisation et Commande de Machines
Sectionneur Contacteur Relais thermique
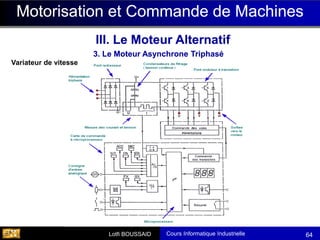
Variateur de vitesse
le courant est modulé par largeur d'impulsions (PWM).
Le courant résultant est proche d'une sinusoïdale
III. Le Moteur Alternatif
3. Le Moteur Asynchrone Triphasé
Cours Informatique Industrielle
CalculateursTemps Réel
Lotfi BOUSSAID 64
Motorisation et Commande de Machines
III. Le Moteur Alternatif
3. Le Moteur Asynchrone Triphasé
Variateur de vitesse
Motorisation et Commande de Machines
III. Le Moteur Alternatif
Motorisation et Commande de Machines
3. Le Moteur Asynchrone Triphasé
III. Le Moteur Alternatif
Motorisation et Commande de Machines
65.
Cours Informatique Industrielle
CalculateursTemps Réel
Lotfi BOUSSAID 65
3. Le Moteur Asynchrone Triphasé
III. Le Moteur Alternatif
Motorisation et Commande de Machines
Plaques signalétiques
Branchement
Nombre de tours par minute
Fréquence d’alimentation
Puissance nominale
Facteur de puissance
Courant nominal
Courant nominal
Masse
Indice de protection
Classe d'isolation F
Année et mois de production
Température ambiante de fonctionnement
3. Le Moteur Asynchrone Triphasé
III. Le Moteur Alternatif
Motorisation et Commande de Machines
66.
Cours Informatique Industrielle
CalculateursTemps Réel
Lotfi BOUSSAID 66
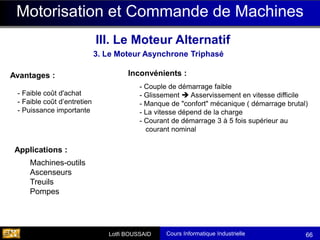
Machines-outils
Ascenseurs
Treuils
Pompes
3. Le Moteur Asynchrone Triphasé
III. Le Moteur Alternatif
Motorisation et Commande de Machines
Avantages :
- Faible coût d'achat
- Faible coût d’entretien
- Puissance importante
Applications :
Inconvénients :
- Couple de démarrage faible
- Glissement ➔ Asservissement en vitesse difficile
- Manque de "confort" mécanique ( démarrage brutal)
- La vitesse dépend de la charge
- Courant de démarrage 3 à 5 fois supérieur au
courant nominal
67.
Cours Informatique Industrielle
CalculateursTemps Réel
Lotfi BOUSSAID 67
4. Le Moteur Synchrone
III. Le Moteur Alternatif
Motorisation et Commande de Machines
- Présence de 2 collecteurs sur l'axe du rotor bobiné
- Moteur à rotor à aimant permanent ( petite puissance) ou à rotor bobiné
- Alimentation du stator en triphasé alternatif;
- Alimentation du rotor en courant continu
Constituants :
Caractéristiques électriques :
68.
Cours Informatique Industrielle
CalculateursTemps Réel
Lotfi BOUSSAID 68
4. Le Moteur Synchrone
III. Le Moteur Alternatif
Motorisation et Commande de Machines
- Vitesse de rotation égale ou sous multiple entier de la vitesse du champ tournant
Symboles :
nombre de paire de pôles 1 2 3 5 10
pas polaire en degré 180 90 60 33 18
vitesse du champ tournant en s-1 50 25 16.6 10 5
vitesse du rotor en tours/minute 50 3000 1500 1000 600 300
(avec des onduleurs à thyristor pour des puissances > 1000 kW)
T.G.V. Atlantique , propulsion de gros navire, malaxeur (industrie chimique), circulateur (centrale nucléaire)
Exemples d'utilisation:










![Cours Informatique Industrielle
Calculateurs Temps Réel
Lotfi BOUSSAID 57
Motorisation et Commande de Machines
III. Le Moteur Alternatif
2. Le Moteur Asynchrone Monophasé
La vitesse de synchronisme : Nsyn (tr/min) = ( 60.f ) / p
La vitesse du rotor N (tr/min) = [ ( 60.f ) / p ] (1-g)
- Plusieurs types de moteurs monophasés existent :
• Moteur à induction avec condensateur
• Moteur à induction sans condensateur
- Faible puissance, faible couple au démarrage, décrochage possible en cas de charge
- Fonctionnement intermittent : Électroménager, commande de vanne, pompes
Applications :](https://image.slidesharecdn.com/coursmotorisationetcommandedemachinesau2024-2025-250730114339-6c7d97a8/85/Cours-Motorisation-et-Commande-de-Machines-AU2024-2025-pdf-57-320.jpg)















![[C elm][co]conversion electromecanique](https://cdn.slidesharecdn.com/ss_thumbnails/celmcoconversionelectromecanique-200227124318-thumbnail.jpg?width=640&height=640&fit=bounds)















