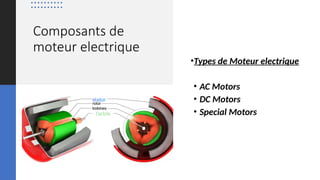
Le document explique le fonctionnement des moteurs électriques, qui convertissent l'énergie électrique en énergie mécanique. Il détaille les différents types de moteurs, y compris les moteurs à courant alternatif, à courant continu et spéciaux, ainsi que leurs caractéristiques spécifiques. Enfin, il aborde les progrès réalisés et les perspectives futures dans le domaine des moteurs électriques.




















![[C elm][co]conversion electromecanique](https://cdn.slidesharecdn.com/ss_thumbnails/celmcoconversionelectromecanique-200227124318-thumbnail.jpg?width=640&height=640&fit=bounds)















