Télécharger pour lire hors ligne

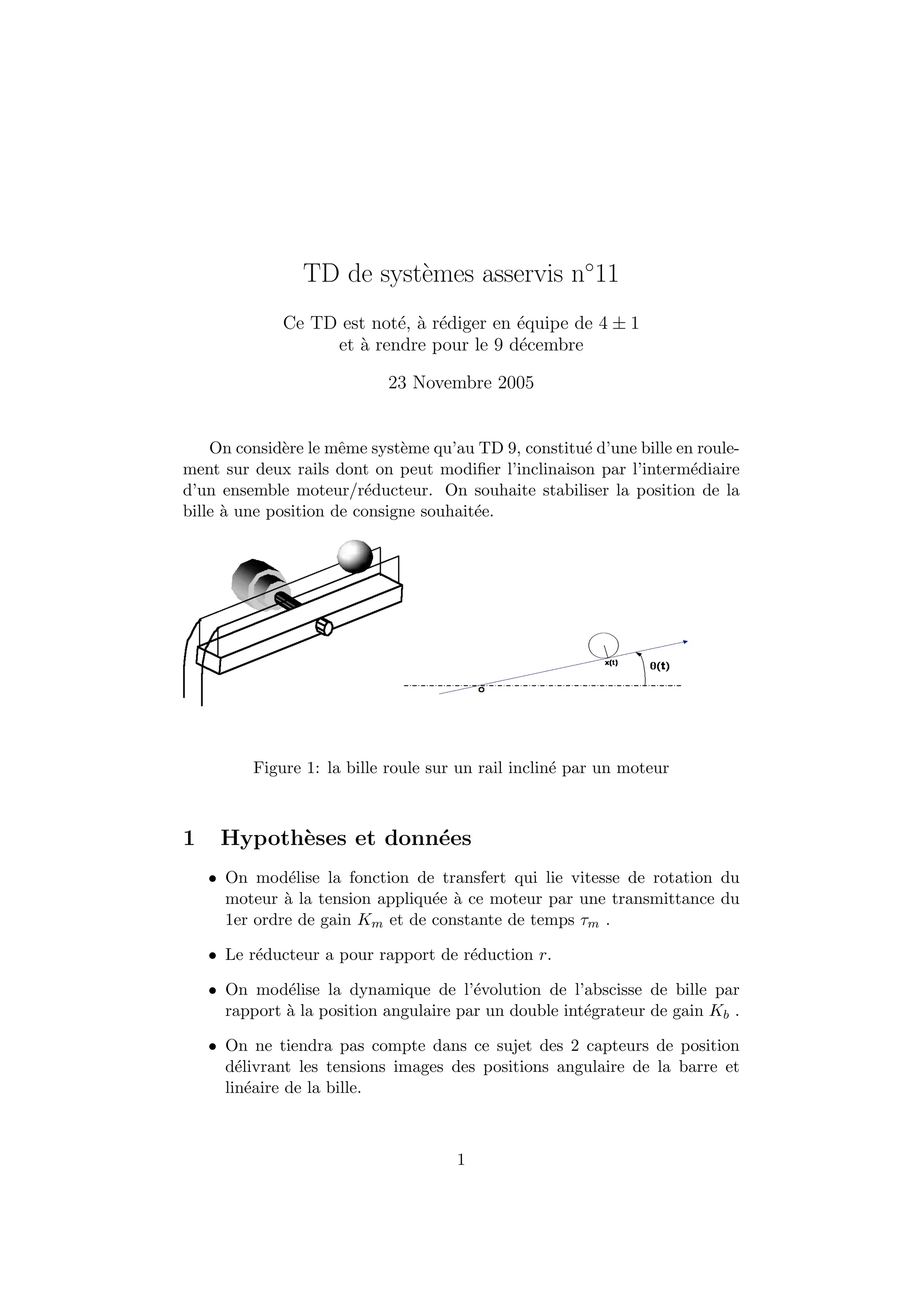


Le document décrit un exercice sur un système asservi avec une bille roulant sur des rails inclinés, nécessitant la stabilité de sa position. Il traite de la modélisation des fonctions de transfert et de la représentation d'état du système, ainsi que de la commande par retour d'état. Les objectifs incluent la proposition de correcteurs et l'utilisation de Simulink pour la simulation des contrôleurs.


























































