1. Rep Nb
1 Corps
Désignation
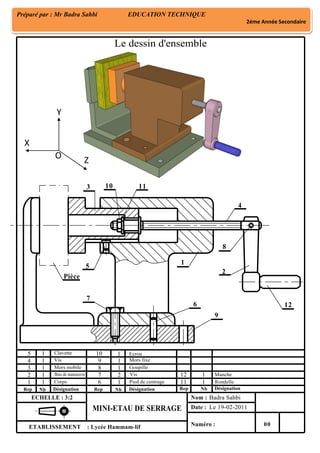
MINI-ETAU DE SERRAGE
2
3
4
5
1
1
1
1
1
Bras de manoeuvre
Mors mobile
Vis
Clavette
Rep
6
7
8
9
Nb
1
2
1
1
Désignation
Vis
Goupille
Mors fixe
ETABLISSEMENT
Nom :
Date :
Numéro : 00
Badra Sahbi
Le 19-02-2011
: Lycée Hammam-lif
Le dessin d'ensemble
ECHELLE : 3:2
Pied de centrage
10 1 Ecrou
Rep Nb Désignation
11 1 Rondelle
12
8
3
5
4
9
2
Pièce
10 11
1
Manche12 1
6
7
Préparé par : Mr Badra Sahbi EDUCATION TECHNIQUE
2éme Année Secondaire
1er
Année Secondaire
Y
X
ZO
2. Etude des solutions constructives
I- Fonctionnement :
Au moyen de la manche (12) on fait tourner la vis (4). Cette rotation se transforme en une
translation au niveau du mors mobile (3). Ce mors mobile avance donc pour serrer la pièce contre
le mors fixe (9).
II- Travail demandé :
1- Analyse du fonctionnement :
a- En se référant au dessin d’ensemble du système préciser la nature des mouvements
d’entrée et de sortie.
- Mouvement d’entrée : ……………………………………………………….
- Mouvement de sortie : ………………………………………………………..
b- Le déplacement du mos mobile (3) est assuré par un système vis-écrou :
Qui joue le rôle de la vis : ………………………………………………………….
Qui joue le rôle d’écrou : ………………………………………………………….
2- Construction d’une liaison mécanique :
a- Compléter le tableau des liaisons ci-dessous:
Liaison Mobilité Désignation Symbole
8 / 2
x y z
T
R
Liaison
………...
…………
4 / 1
x y z
T
R
Liaison
………...
…………
4 / 3
x y z
T
R
Liaison
………...
…………
2
8
4
1
3 4
3. b-Compléter le schéma cinématique du système :
3 /1
x y z
T
R
Liaison
………...
…………
9 /1
x y z
T
R
Liaison
………...
…………
1
3
19
1
3
4
2
9
4. 1- Analyse du fonctionnement :
a- En se référant au dessin d’ensemble du système préciser la nature des mouvements
d’entrée et de sortie.
- Mouvement d’entrée : Rotation de la vis (4).
- Mouvement de sortie : Translation du mors mobile (3).
b- Le déplacement du mos mobile (3) est assuré par un système vis-écrou :
Qui joue le rôle de la vis : vis (4).
Qui joue le rôle d’écrou : Corps(1).
2- Construction d’une liaison mécanique :
a- Compléter le tableau des liaisons ci-dessous :
Liaison Mobilité Désignation Symbole
8 / 2
x y z
T 0 0 0
R 0 0 0
Liaison
Encastrement
4 / 1
x y z
T 1 0 0
R 1 0 0
Conjugué
Liaison
Hélicoïdale
4 / 3
x y z
T 0 0 0
R 1 0 0
Liaison
Pivot
2
8
4
1
3
4
5. b- Compléter le schéma cinématique du système :
3 /1
x y z
T 1 0 0
R 0 0 0
Liaison
Glissière
9 /1
x y z
T 0 0 0
R 0 0 0
Liaison
Encastrement
1
3
19
1
3
4
2
9