1. Devoir n°6 MPSI janvier 2015 sujet Page 1
MPSI Devoir de Sciences Industrielles
pour l’Ingénieur n°6
janvier
2015
I. Table élévatrice
Présentation :
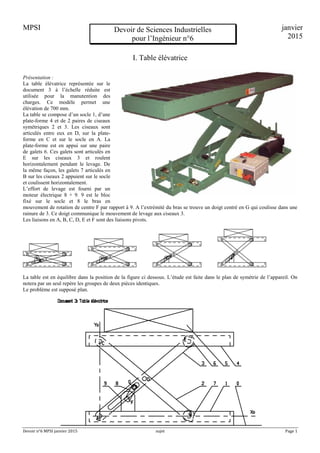
La table élévatrice représentée sur le
document 3 à l’échelle réduite est
utilisée pour la manutention des
charges. Ce modèle permet une
élévation de 700 mm.
La table se compose d’un socle 1, d’une
plate-forme 4 et de 2 paires de ciseaux
symétriques 2 et 3. Les ciseaux sont
articulés entre eux en D, sur la plate-
forme en C et sur le socle en A. La
plate-forme est en appui sur une paire
de galets 6. Ces galets sont articulés en
E sur les ciseaux 3 et roulent
horizontalement pendant le levage. De
la même façon, les galets 7 articulés en
B sur les ciseaux 2 appuient sur le socle
et coulissent horizontalement.
L’effort de levage est fourni par un
moteur électrique 8 + 9. 9 est le bloc
fixé sur le socle et 8 le bras en
mouvement de rotation de centre F par rapport à 9. A l’extrémité du bras se trouve un doigt centré en G qui coulisse dans une
rainure de 3. Ce doigt communique le mouvement de levage aux ciseaux 3.
Les liaisons en A, B, C, D, E et F sont des liaisons pivots.
La table est en équilibre dans la position de la figure ci dessous. L’étude est faite dans le plan de symétrie de l’appareil. On
notera par un seul repère les groupes de deux pièces identiques.
Le problème est supposé plan.
2. Devoir n°6 MPSI janvier 2015 sujet Page 2
Données du problème:
1
.
AD L x
= 2
.
FG l x
=
L = AD = DE
= CD = DB = 560 mm 0 0
. .
F F
AF x x y y
= +
( )
1
0 , x
x
=
θ ( )
2
0 , x
x
=
ϕ avec
1
.
5
,
0 −
= s
rd
ϕ
ɺ
l = FG = 120 mm xF = 275 mm
yF = 173 mm
µ (t) = AG λ(t) = AC
Schéma cinématique :
I. Etude géométrique.
1. Donner les coordonnées des points B, C, D et E dans le repère )
,
,
( 0
0 y
x
A en fonction de L et θ.
2. Quel est le mouvement du plateau 4 par rapport au bâti 0. En déduire les caractéristiques cinématiques du mouvement
de 4 par rapport à 0 en fonction de θ
θ ɺ
et
,
L .
3. Le point G se trouve sur l’axe (A; x1). En exprimant le vecteur AG sous la forme AF FG
+ , donner une
expression de θ et de µ en fonction de xF; yF, l et ϕ. Pour la suite du problème, on utilisera θ.
4. Déterminer les caractéristiques géométriques (positions de 8) qui imposent les valeurs extrêmes de θ.
5. En déduire les valeurs extrêmes de la position du plateau 4.
II Etude cinématique analytique.
On souhaite déterminer la vitesse de glissement au niveau du point G.
1. Ecrire les caractéristiques cinématiques des mouvements de 3 / 0 et 8/0.
2. En déduire les vecteurs : )
0
/
8
,
(G
V et )
0
/
3
,
(G
V .
3. Exprimer la condition cinématique du contact avec glissement et G entre 3 et 8.
4. En déduire la vitesse de glissement.
5. Ecrire les caractéristiques cinématiques 2/0. En déduire le vecteur )
0
/
7
,
(B
V .
6. Le galet 7 a un rayon noté R. Déduire du résultat précédent et de la condition de roulement sans glissement entre le
galet et le bâti 0, l’expression de 0
/
7
Ω .
5
4
2
3
8
6
7
0
C
E
D
A
F
G
B
3. Devoir n°6 MPSI janvier 2015 sujet Page 3
III. Modification du mécanisme.
On modifie le mécanisme pour augmenter l’amplitude des
mouvements du plateau.
Déterminer l’amplitude du mouvement du plateau 4 ainsi que le
vecteur : )
0
/
4
,
(C
V .
2
3
8
6
7
0
H
D
A
F
G
B
5
4
C
E
10
11 J
I
4. Devoir n°6 MPSI janvier 2015 sujet Page 4
II. Bras maître à retour d’effort de système de réalité virtuelle (d’après Mines MP 2007)
Présentation
La réduction des délais de conception, de mise au point des produits et de leurs procédés de fabrication est une exigence des
entreprises industrielles sur les marché à forte concurrence. Améliorant cette productivité, les outils de simulation informatique
sont utilisés sur maquette numérique, dès la phase de
conception sans faire appel à des prototypes physiques.
Ainsi un avion est maintenant testé et simulé avant qu’il
n’existe réellement. Ses futurs pilotes s’exercent à son
pilotage avant que le premier exemplaire ne vole. Ans
l’industrie automobile gourmande d’opérations
d’assemblage, les opérateurs peuvent tester et simuler
des postes de travail avant même que le véhicule
n’existe physiquement.
Parmi les outils actuels, le système à retour d’effort
permet à son utilisateur d’interagir avec son
environnement virtuel par l’intermédiaire du sens du
toucher. L se compose d’une structure mécanique
articulé, le bras maître, équipés de moteurs et de
capteurs, reliés à une électronique embarquée ;
L’utilisateur prend en main la poignée situé à
l’extrémité de la structure e peut la déplacer librement,
provoquant ainsi le déplacement de l’image dans la
scène virtuelle. L’image ci-contre représente un
opérateur qui s’entraîne au montage du moteur lève-
vitre dans une portière automobile. Une image de
synthèse reconstitue l’environnement tridimensionnel de
travail et deux bras maître réalisent le retour d’effort sur les mains de l’opérateur simulant ainsi les résistance générées par le
composant à manipuler et les chocs de cet environnement L’opérateur perçoit la scène grâce au retour visuel et au retour
d’effort, ces derniers constituants le flux haptique.
La société HAPTION conçoit et commercialise des interfaces à retour d’effort. Le modèle « VIRTUOSE 6D » permet
d’exercer sur la main de l’opérateur 3 forces et 3 moments. Le modèle « VIRTUOSE 3D »qui n’exerce, lui, que seulement
trois forces est étudié dans un contexte de réalité virtuelle et présenté ci-dessous :
La figure ci-contre présente la structure de ce bras
maître :
Il est principalement constitué (hormis le bâti 0) de
la mise en série de cinq solides :
le socle 1 ;
le bras 2 ;
l’avant-bras 3 ;
la platine 5 ;
la poignée de manœuvre 8.
Les quatre premiers solides forment avec le bâti la
chaîne ouverte des liaisons pivot L01, L12 et L23.
La poignée 8, est reliée à la platine 5 par trois
liaisons pivot en série dont les axes se coupent en
O.
La platine 5 est maintenue horizontale par une
transmission à poulies et câbles
5. Devoir n°6 MPSI janvier 2015 sujet Page 5
Un modèle simplifié est donné ci-dessous :
Les barres BC et CD ont des longueurs identiques notées l.
Partie I : étude générale
1. Exprimer les coordonnées de C et D dans la base 1 1 1 1
( , , , )
B B i j k .
2. Le solide 5 reste toujours horizontal, Donner les expressions des vecteurs vitesse de rotation : 2/1
Ω , 3/ 2
Ω et 5/1
Ω .
3. En déduire l’expression du vecteur vitesse de rotation : 3/1
Ω .
4. Donner les expressions des vecteurs suivants : ( , 2 / 1)
B
V , ( , 2 / 1)
C
V , ( , 3 / 2)
D
V .
5. En déduire ( , 3 / 1)
D
V .
Le solide 1 est mobile par rapport au bâti 0 en mouvement de rotation d’axe ( ) ( )
0 1
, ,
A j A j
= . Le schéma complet est le
suivant :
Sur le schéma ci-contre contient la représentation dans
l’espace de quatre liaisons pivot. Un exemple est donné
ci-dessous avec les solides 0 et 1 seuls puis l’assemblage
en liaison pivot :
6. Donner l’expression des vecteurs : 1/0
Ω et ( ,1 / 0)
A
V .
7. En déduire 2/0
Ω , 3/0
Ω et 5/0
Ω .
8. En déduire le vecteur vitesse : ( , 3 / 0)
D
V .
6. Devoir n°6 MPSI janvier 2015 sujet Page 6
Partie II : étude du mécanisme de maintien horizontal
Dans cette partie nous allons étudier le mécanisme qui permet à la pièce 5 de rester horizontale. Pour cela, il est nécessaire
d’étudier le mécanisme poulie-courroie.
Etude préliminaire : système poulies-courroie.
Le mécanisme ci-dessous est formée de 2 poulies 1 et 2 de même rayon R en liaison pivot par rapport à un bâti 0 et d’une
courroie. On note les vitesses de rotation de 1 et 2 : 1/0
ω et 2/0
ω .
1. Donner les expressions des vitesses : ( )
,1/0
A
V et ( )
,2/0
B
V en fonction de R, de 1/0
ω et de 2/0
ω .
2. Imposer le roulement sans glissement en A et B entre la courroie et les poulies 1 et 2.
3. Quel est le mouvement du brin AB de la courroie ?
4. En déduire une relation simple entre 1/0
ω et 2/0
ω .
Sur le bras maître à retour d’effort, le mécanisme de maintien horizontal de 5 est le suivant. Une poulie de rayon R est liée à 1,
une 2nde
poulie 4 de même rayon est en liaison pivot avec le solide 2 en C. Une 3ème
poulie 5 de même rayon est en liaison avec
3 en D. Une courroie s’enroule autour des poulies 1 et 4 et l’autre autour des poulies 4 et 5.
5. Utiliser la relation déterminée à la question précédente pour déterminer une relation 5/3
ω et 4/3
ω .
6. Décomposer par rapport à 1 pour déterminer une relation entre 5/1
ω et 4/1
ω .
7. Faire de même pour l’ensemble 1, 2 et 4 et déterminer les valeurs de 4/1
ω et 5/1
ω .
8. Quels sont alors les mouvements de 5 par rapport à 0 ?