Téléchargé 305 fois







![Révision – Cours Génie Mécanique Page 22 / 26 Mtaallah Mohamed
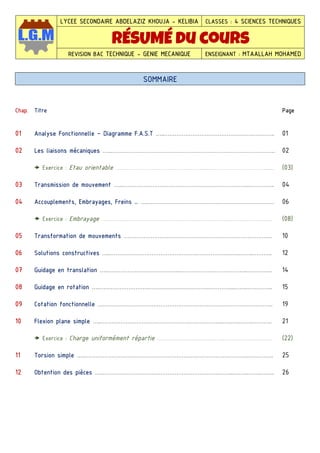
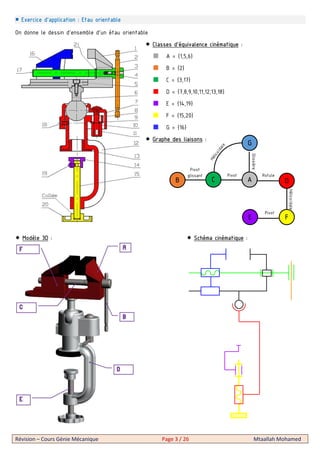
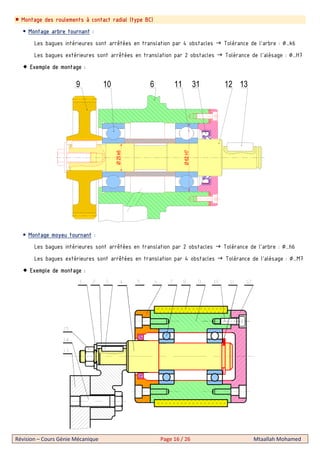
Exercice d’application : Charge uniformément répartie
Un arbre de transmission est assimilé à une poutre cylindrique creuse de longueur ] 180 == sollicitée à la
flexion et représenté par le modèle ci-dessous :
On donne : ‖aKK⃗‖ b 3 /
1. Installer sur la figure ci-dessus les réactions aux appuis M
KKKKK⃗ en A et [
KKKKK⃗ en D
- Montrer que c M
KKKKK⃗c c [
KKKKK⃗c %
La répartition des charges est symétrique tout au long de la poutre
Ainsi : c M
KKKKK⃗c c [
KKKKK⃗c
a I 3
%
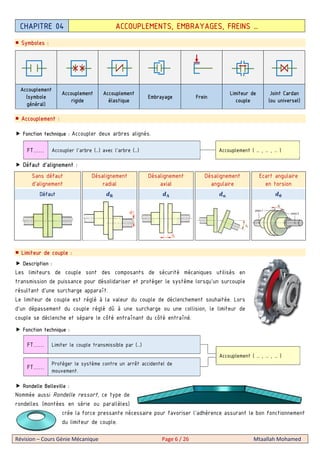
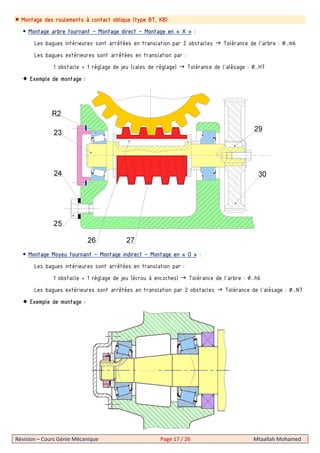
2. Tracer le diagramme des efforts tranchant Ty :
Zone [AB] BH .d,c M
KKKKK⃗ce . %
Zone [BC] où 5 S 5
BH .d,c M
KKKKK⃗c . a NYe . % , 3+S . 5 -
N+S 5 - BH . % , 3 . %
+S 5 - BH . % , 3 , %
Zone [CD] BH ,d,c [
KKKKK⃗ce , %
.
3. Tracer le diagramme des moments fléchissant MFz :
Zone [AB] où S 5
T .d.c M
KKKKK⃗c MYe , % . S
M+S - T , %
N+S 5 - T , % 5 , . , .
A
H
S
100
+aKK⃗
DB C
40 40
M
KKKKK⃗ [
KKKKK⃗
A
BHf g
S
-150
+
D
B
C
+150](https://image.slidesharecdn.com/resumecoursmecanique-200618210006/85/Resume-Cours-Genie-Mecanique-4ST-24-320.jpg)
![Révision – Cours Génie Mécanique Page 23 / 26 Mtaallah Mohamed
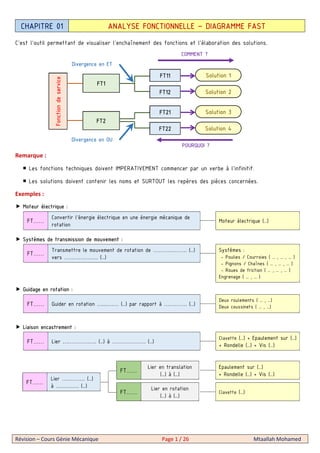
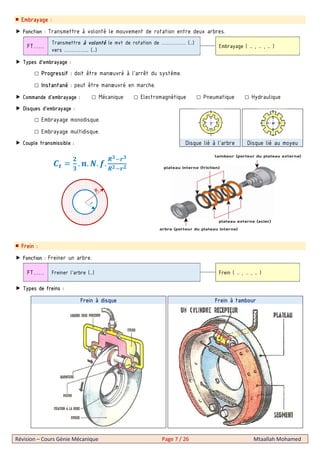
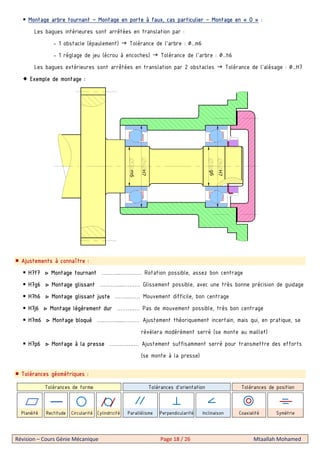
Zone [BC] où 5 S 5
T . h.c M
KKKKK⃗c MY , a NY
NY
i , % . S .
3
+S . 5 -
N+S 5 - T , % 5 .
3
. .
+S 5 - T , % 5 .
3
. .
CS +D F ∶ I & " W I I é é II -
T k +S - , % . 3+S . 5 - S
%
3
, 5 @
T +S - , % @ .
3
% @ % . @, % .
Zone [CD] où 5 S l
T ,d,c [
KKKKK⃗c Y[e , % . + l . S-
+S 5 - T , % 5 , . , .
[+S l - T , %
En déduire MFzmax : T S @ % . @, % .](https://image.slidesharecdn.com/resumecoursmecanique-200618210006/85/Resume-Cours-Genie-Mecanique-4ST-25-320.jpg)


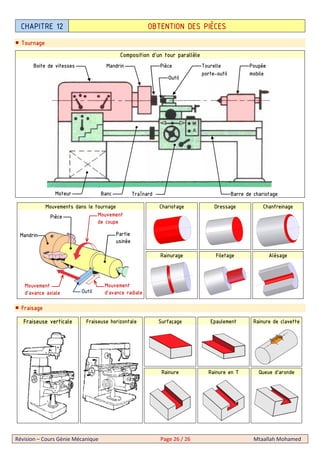

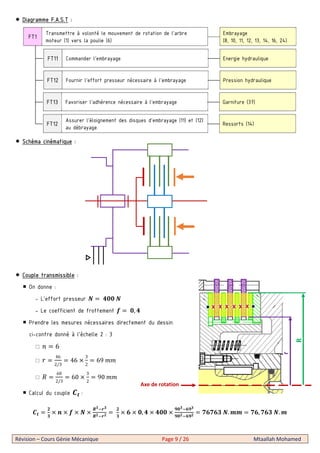
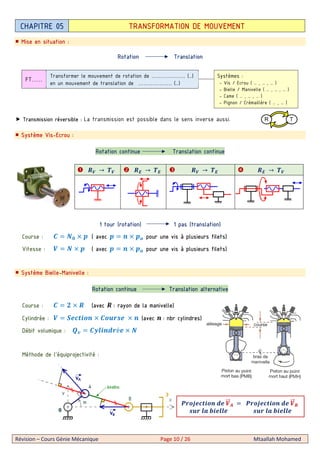
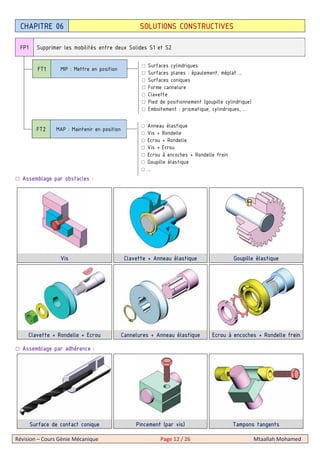
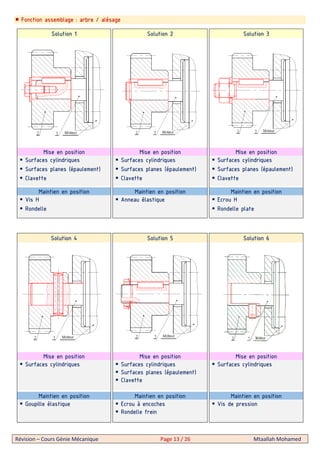
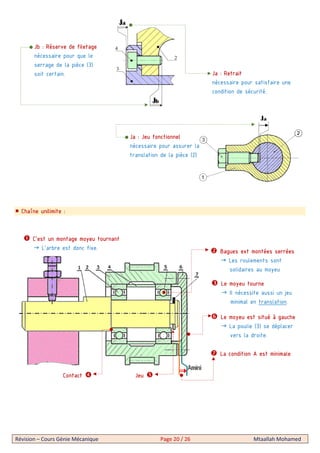
Le document est un récapitulatif d'un cours de génie mécanique, couvrant des sujets tels que l'analyse fonctionnelle, les liaisons mécaniques, les transmissions de mouvement et les solutions constructives. Il fournit des exemples, exercices, schémas cinématiques et formules pour illustrer les concepts clés liés à la mécanique. Destiné aux étudiants de la classe de 4e sciences techniques, ce document est utilisé pour la révision du bac technique en génie mécanique.


































































