Téléchargé 219 fois

























![18 Géométrie et cinématique du déplacement
y0
x0
z0
R0
xn
yn
zn
Rn
T
α
β
r
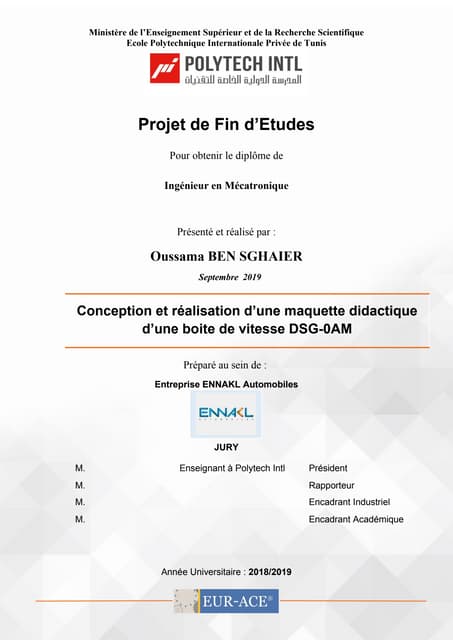
Figure 1.14 – Coordonnées sphériques
.
On peut exprimer les coordonnées cylindriques en fonction des coordonnées caté-siennes
par les relations suivantes :
r =
p
P2
x + P2
y
α = atan2(Py, Px)
z = Pz
(1.59)
où la fonction atan2 permet le calcul de l’arc-tangente à partir de deux arguments.
Le résultat α ∈ [−180; 180], le quadrant étant fixé par l’analyse du signe de Px et
de Py. Seul les cas Px = 0 et Py = 0 constitue une singularité (impossibilité de
solution).
Coordonnées sphériques Cette représentation est utilisée lorsque la structure
du robot est spérique (par exemple : robot Unimation-1000/2000/4000, Psa-barnabé,
Stanford,...). La figure 1.14 illustre cette représentation. La matrice
de position est la suivante :
Psph =
r.cα.sβ
r.sα.sβ
r.cβ
(1.60)
On peut exprimer les coordonnées spériques en fonction des coordonnées carté-siennes,
par les relations qui suivent :
r =
p
P2
x + P2
y + P2
z
α = atan2(Py, Px) si β6= 0 ou α = 0 si β = 0
α = atan2
Py
sα
, Pz
!
si α6= 0 ou β = atan2(Px, Pz) si α = 0
(1.61)](https://image.slidesharecdn.com/chateaut-141101205614-conversion-gate02/85/cour-robotique-28-320.jpg)



![22 Géométrie et cinématique du déplacement
y0
x0
z0
R0
xn
yn
zn
Rn
y1
x1
z1
x2
z2
φ
φ
φ
θ
θ
θ
ψ
ψ
ψ
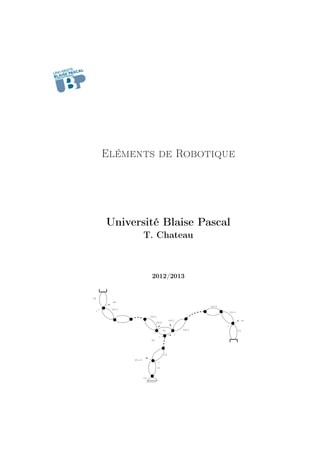
Figure 1.17 – Les angles de roulis-tangage-lacet (convention z, y, x)
.
d’où
ARTL =
cφ.cθ cφ.sθ.sψ − sφ.cψ cφ.sθ.cψ + sφ.sψ
sφ.cθ sφ.sθ.sψ + cφ.cψ sφ.sθ.cψ − cφ.sψ
−sθ cθ.sψ cθ.cψ
(1.72)
On peut montrer, que le passage des cosinus directeurs aux angles RTL est obtenu
par les relations suivantes :
φ = atan2(sy, sx) à 1800 près (φ = atan2(−sy,−sx) + 1800) (1ère colonne)
θ = atan2(−sz, cφ.sx + sφ.sy) (1ère colonne)
ψ = atan2(sφ.ax − cφ.ay,−sφ.nx + cφ.ny) (3/4éme colonne)
(1.73)
IL y a une singularité si sy = sx = 0
Les paramètres d’Euler (les quaternions) Dans ce cas, l’orientation d’un re-père
Rn, associé à un solide quelconque, dans un repère de référence R0, est déter-minée
par la spécification des 4 paramètres (λ1, λ2, λ3, λ4) qui décrivent une rotation
unique équivalente θ ∈ [−180; 180] autour d’un axe de vecteur unitaire ~u, tels que :
λ1 = cos
2
λ2 = ux. sin
2
λ3 = uy. sin
2
λ4 = uz. sin
2
(1.74)](https://image.slidesharecdn.com/chateaut-141101205614-conversion-gate02/85/cour-robotique-32-320.jpg)







![30
Modélisation géométrique des robots - Commande en position des
robots
L’Ecole Centrale de Nantes a mis sur le marché un logiciel appelé SYMORO+
[KC] qui permet l’étude, le développement et le test de tous ces modèles.
Il existe des méthodes et notations utilisées pour la modélisation des robots. La
plus répandue est celle de Denavit-Hartenberg [DH55]. Elle est bien adaptée pour des
structures ouvertes simples, mais présente des ambiguïtés lorsqu’elle est appliquée
sur des robots à structures fermées ou arborescentes. Dans les années 80, Wisama
Khalil propose une modification de cette méthode : méthode de Denavit-Hartenberg
modifiée (dîte méthode de Khalil). Cette méthode permet la description homogène
en un nombre minimum de paramètres pour la représentation des différentes struc-tures
de robots généralement rencontrés.
2.2 Description de la structure géométrique d’un
robot
2.2.1 Notations et règles générales
La méthode générale est basée sur les règles et conventions suivantes :
– la variable de l’articulation j est notée qj
– le corps j est noté Cj
– les corps sont supposés parfaitement rigides. Ils sont connectés par des articu-lations
considérées comme idéales.
– le repère Rj est lié au corps Cj
– l’axe du zj repère Rj , est porté par l’axe articulaire j
– les paramètres qui permettent de définir le repère Rj , par rapport au repère
antécédent sont munis de l’indice j
2.2.2 Description des robots à chaîne ouverte simple
2.2.2.1 Cadre général
Le système est composé de n+1 corps C0, C1, C2...Cn et de n articulations (voir
figure 2.1).
Le corps C0 désigne la base du robot. Le corps Cn est celui qui porte l’organe
terminal.
L’articulation j connecte le corps Cj au corps Cj−1.
2.2.2.2 Paramétrage de Denavit-Hartenberg modifié (Khalil 86)
Le repère Rj fixé au corps Cj est défini de telle sorte que :
– zj est porté par l’axe articulaire j
– xj est porté par la perpendiculaire commune aux axes zj et zj+1 Si zj et zj+1
sont parallèles ou colinéaires, le choix de xj n’est pas unique. Dans ce cas, des](https://image.slidesharecdn.com/chateaut-141101205614-conversion-gate02/85/cour-robotique-40-320.jpg)












![46
Modélisation géométrique des robots - Commande en position des
robots
R0
Rn
z = fT0
0Tn
Rf RE
E = nTE
fTE
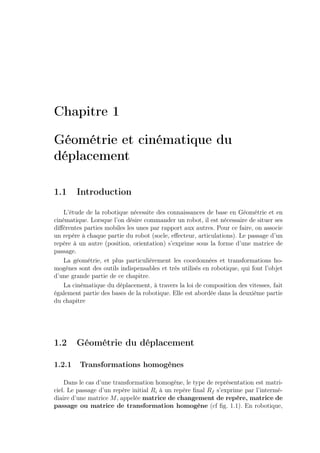
Figure 2.11 – Repères nécessaires pour décrire un robot dans un atelier.
.
R0. Pour une chaîne ouverte simple, on a :
0Tn =o T1.1T2...n−1Tn (2.18)
La matrice de transformation globale fTE s’écrit alors :
fTE = Z.0Tn.E (2.19)
Pour établir les modèles géométriques d’un robot, il sera nécessaire auparavant de
mesurer la situation du robot dans le repère atelier Z, et de calibrer la situation E
du repère outil RE dans le repère terminal du robot Rn.
2.3.2 Calcul du modèle géométrique direct d’un robot
(MGD)
Définition : Le modèle géométrique direct est l’ensemble des relations permet-tant
d’exprimer la situation de l’organe terminal du robot en fonction des variables
articulaires.
La situation de l’organe terminal X est définie par m coordonnées opérationnelles
X = [x1x2...xm−1xm]T (2.20)
Les variables articulaires sont définies par le vecteur q de dimension n :
q = [q1q2...qn−1qn]T (2.21)
Le modèle géométrique s’écrit alors : X = f(q)
Plusieurs possibilités sont offertes pour définir le contenu du vecteur X. Nous
avons vu dans la première partie de ce cours, qu’il existait plusieurs façons de coder
la position et l’orientation d’un corps solide.
Par exemple, si l’on choisit :](https://image.slidesharecdn.com/chateaut-141101205614-conversion-gate02/85/cour-robotique-56-320.jpg)
![2.3 Modélisation géométrique directe d’un robot 47
– la position cartésienne et les cosinus directeurs pour l’orientation, on obtient
X = [PxPyPzSxSySznxnynzaxayaz]T (2.22)
– la position cartésienne et les angles RTL pour l’orientation, on obtient
X = [PxPyPzφθψ]T (2.23)
2.3.3 Exemples de modèles géométriques directs
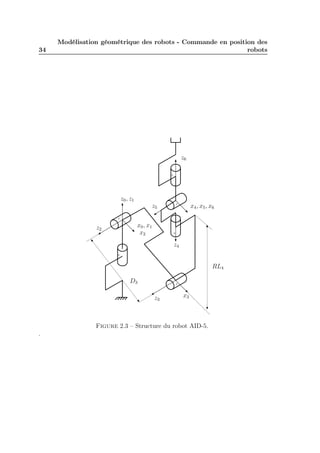
2.3.3.1 MGD du robot AID-5
Le synoptique de ce robot est donné figure 2.3, page 34. On rapelle le tableau
des paramètres de Devavit-Hartenberg de ce robot ci-dessous :
J σj αj dj θj rj Trièdre
R0 =⇒ R1 0 0 0 q1 0 D/I
R1 =⇒ R2 0 90 0 q2 0 D
R2 =⇒ R3 0 0 D3 q3 0 D/I
R3 =⇒ R4 0 90 0 q4 −RL4 D
R4 =⇒ R5 0 −90 0 q5 0 I
R5 =⇒ R6 0 −90 0 q6 0 I
D3 et RL4 sont les caractéristiques géométriques du robot. On rappelle l’expression
de la matrice de transformation homogène associée au paramètrage de Denhavit-
Hartenberg.
j−1Tj =
Cθj −Sθj 0 dj
Cαj .Sθj Cαj .Cθj −Sαj −rj .Sαj
Sαj .Sθj Sαj .Cθj Cαj rj .Cαj
0 0 0 1
(2.24)
On en déduit les matrices 0T1,1 T2,2 T3,3 T4,4 T5 et 5T6. Pour ce faire une solution
consiste à utiliser un logiciel de calcul formel. Parmis les plus connus, nous pouvons
citer matlab qui dispose d’une boite à outils dédiée au calcul symbolique, Maple,
Maxima. Dans ce cour, nous avons utilisé Maxima, car il posséde une licence Libre
d’utilisation.
Nous avons tout d’abord modélisé le tableau de DH sous une forme matricielle :
Modélisation du MGD :
DH :
0 0 0 q1 0
0
2 0 q2 0
0 0 D3 q3 0
0
2 0 q4 −RL4
0 −
2 0 q5 0
0 −
2 0 q6 0
](https://image.slidesharecdn.com/chateaut-141101205614-conversion-gate02/85/cour-robotique-57-320.jpg)



![2.3 Modélisation géométrique directe d’un robot 51
(D61) 0@
Cq1 (−C(q3 + q2) Cq4Sq5 − S (q3 + q2) Cq5) − Sq1S q4Sq5
Sq1 (−C(q3 + q2) Cq4Sq5 − S (q3 + q2) Cq5) + Cq1S q4Sq5
C(q3 + q2) Cq5 − S (q3 + q2) Cq4S q5
1A
(C62) P0 : Extrait (U0, 4)
(D62) 0@
Cq1 (D3Cq2 − S ( q3 + q2) RL4)
Sq1 (D3Cq2 − S ( q3 + q2) RL4)
C(q3 + q2) RL4 + D3Sq2
1A
A partir de la matrice de passage U0, il est possible de choisir comme vecteur de
coordonnées opérationnelles :
X = [PxPyPzSxSySznxnynzaxayaz]T (2.34)
Dans ce cas, le modèle géométrique direct du robot est donné par les 12 relations
issues de U0. On peut noter que dans ce cas, la descrition est redondante car 6
paramètres suffisent pour décrire la position et l’orientation de l’organe terminal
dans le repère atelier. Si on veut réduire le nombre de paramètres, alors, il faudra
choisir un système de descrition d’angles. Dans ce cas, le MGD sera décrit pas le
vecteur de position P et trois angles.
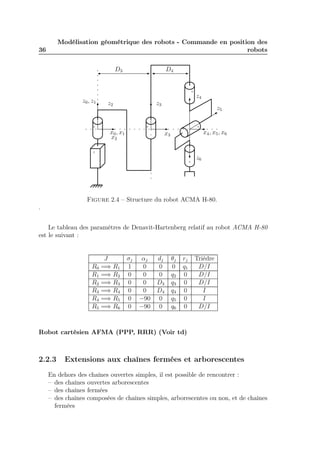
2.3.3.2 MGD du robot H-80
On rapelle le tableau des paramètres de Denavit-Hartenberg relatif au robot
ACMA H-80 :
J σj αj dj θj rj Trièdre
R0 =⇒ R1 1 0 0 0 q1 D/I
R1 =⇒ R2 0 0 0 q2 0 D/I
R2 =⇒ R3 0 0 D3 q3 0 D/I
R3 =⇒ R4 0 0 D4 q4 0 I
R4 =⇒ R5 0 −90 0 q5 0 I
R5 =⇒ R6 0 −90 0 q6 0 D/I
Le synoptique de ce robot est donné figure 2.4 page 36
GCL (GNU Common Lisp) Version(2.4.0) Wed May 9 12 :02 :00 CDT 2001
Licensed under GNU Library General Public License
Contains Enhancements by W. Schelter
Maxima 5.6 Wed May 9 12 :01 :49 CDT 2001 (with enhancements by W.
Schelter).
Licensed under the GNU Public License (see file COPYING)
batch(MGDH80) ;
batching MGDH80.mac
PRINT( Calcul du MGD)
Calcul du MGD
Calcul du MGD](https://image.slidesharecdn.com/chateaut-141101205614-conversion-gate02/85/cour-robotique-61-320.jpg)



![2.4 Modélisation géométrique inverse d’un robot 55
2.3.3.3 MGD du robot AFMA
2.4 Modélisation géométrique inverse d’un robot
2.4.1 Introduction
Le modèle géométrique direct MGD permet de calculer les coordonnées opéra-tionnelles
X en fonction des coordonnées articulaires q :
MGI
X q
MGD
Le problème inverse MGI consiste à calculer les coordonnées articulaires qui
amènent l’organe terminal dans une situation désirée, spécifiée par ses coordonnées
opérationnelles.
Lorsqu’elle existe, la forme explicite qui donne toutes les solutions possibles au
problème inverse (il y a rarement unicité de la solution) constitue ce que l’on appelle
le modèle géométrique inverse MGI.
Il n’existe pas une méthode analytique générale pour trouver le MGI, mais un
certain nombre de méthodes, plus ou moins adaptées à des classes de cinématiques
particulières :
– la méthode de Pieper [Pie68] : permet de résoudre le problème pour un nombre
limité d’architectures simples (robots à 6 degrés de liberté (ddl), possédant 3
articulations rotoïdes d’axes concourants ou 3 articulations prismatiques).
– la méthode de Paul [Pau81] : traite séparément chaque cas particulier et
convient à la majorité des robots industriels
– les méthodes géométriques ([LZ83], Elgazzar 85) consistent à trouver directe-ment
chaque variable articulaire à partir de considérations géométriques. Il y
a une grande dépendance de ces méthodes avec l’architecture du robot.
Lorsque le modèle géométrique inverse n’existe pas (pas de forme explicite), on utilise
des procédures numériques.
Par itérations successives, on calcule une solution particulière au problème in-verse,
qui est une solution locale (dépendant des conditions initiales). Outre cet
inconvénient, ces méthodes sont pénalisantes en temps de calcul.
citons par exemple :
– les méthodes de type Newton RAPHSON procédant par linéarisation de la
matrice de passage du mécanisme [Pie68].
– les méthodes basées sur le modèle différentiel inverse ([Fou80, Ren80, GBF85]).](https://image.slidesharecdn.com/chateaut-141101205614-conversion-gate02/85/cour-robotique-65-320.jpg)
![56
Modélisation géométrique des robots - Commande en position des
robots
– les méthodes basées sur la transposée de la matrice jacobienne ([WE84, SS94]).
Nous utiliserons en détail dans cette partie, les méthodes de Pieper et de Paul,
conduisant à une forme explicite du transformateur de coordonnées (MGI).
2.4.2 Position du problème
Soit fTE la matrice de transformation homogène représentant la situation finale
désirée du repère outil par rapport au repère atelier.
On a vu que dans le cas général, on peut exprimer fTE sous la forme :
fTE = Z.0Tn.E (2.35)
avec :
– Z = matrice de transformation homogène définissant le repère R0 du robot
dans le repère atelier.
– E = matrice de transformation homogène définissant le repère outil RE dans
le repère terminal.
– 0Tn = matrice de passage homogène du robot.
En regroupant à droite les termes connus, on obtient la relation
U0 =0 Tn = Z−1.fTE.E−1 (2.36)
Le problème consiste à trouver les variables articulaires q1, q2, ...qn pour que 0Tn soit
égal à U0.
On donne l’expression numérique de fTE et on connait celle de Z et de E.
En résumé :
X → fTE → U0 → q
Convension (2.36) Méthode de Paul
(2.37)
Conclusion : Après avoir calculé la valeur numérique de U0 à partir de X, on
utilise l’expression analytique de U0 pour extraire le vecteur q. La principale difficulté
est donc ette dernière étape.
2.4.3 Résolubilité d’un robot manipulateur (introduit par
Pieper 68)
Un robot manipulateur est dit résoluble lorsqu’il est possible de calculer toutes
les configurations permettant d’atteindre une situation donnée.
Tous les robots ne le sont pas, mais ce n’est pas une condition nécessaire pour
la commande car dans de pareil cas, des méthodes itératives numériques sont mises
en oeuvre pour trouver une solution locale.
D’après Roth (76), les robots à moins de 6 ddl sont toujours résolubles.
Avec 6 ddl, ils sont résolubles lorsqu’ils présentent les caractéristiques suivantes :](https://image.slidesharecdn.com/chateaut-141101205614-conversion-gate02/85/cour-robotique-66-320.jpg)










![2.4 Modélisation géométrique inverse d’un robot 67
Pour les 3 dernières, on utilise une seconde relation. Une fois la position atteinte,
l’organe terminal se trouve dans une orientation initiale dûe aux différentes trans-formations
homogènes depuis le repère de base du robot R0, jusqu’au dernier repère
du porteur Rn−3.
A partir de la matrice U0, on peut extraire la matrice des cosinus directeurs 0An.
0An = [ s n a] est une donnée du problème inverse.
On peut donc écrire :
n−3A0[ s n a] =n−3 An (2.91)
Les premières variables articulaires q1, q2..qn−3 étant calculées à partir de la position
de l’organe terminal, la matrice n−3A0 est donc connue numériquement. Le terme de
gauche est donc entièrement connu. On réduit le système à trois variables articulaires
qn−2, qn−1 qn.
Pour déterminer leurs valeurs numériques, on utilise la méthode itérative du
paragraphe 2.4.5.1 page 58.
Remarque :
1. Lorsque le robot à 6ddl (n = 6), les deux relations précédentes s’écrivent :
– Pour la position, on détermine q1, q2, q3 avec :
Px
Py
Pz
1
=0 T1
1 T2
2 T3
3 T4
0
0
0
1
(2.92)
où
Px
Py
Pz
1
est la position de l’organe terminal et 0T1
1 T2
2 T3
3 T4
0
0
0
1
ne dé-pend
que de q4, a5, q6.
– Pour l’orientation, on détermine q4, q5, q6 à partir de :
3A0 [s n a] =3 A6
↑ ↑ ↑ Ne dépend que de Matrice des cos. directeurs Ne dépend que de
q1q2q3 extraite à partir de U0 q4q5q6
(2.93)
2. Dans la remarque précédente, la première relation fait apparaître la matrice
de transformation homogène 3T4. Celle-ci n’est utile que si l’origine du repère
R3 ne coïncide pas avec l’origine du repère R4. Sa présence dans la relation,
permet de prendre en compte les paramètres géométriques fixes de la liaison
R3/R4.
3. Lorsque n est supérieur à 6, on dit que le robot est redondant. Il sera donc né-cessaire
d’introduire des relations supplémentaires décrivant cette redondance.](https://image.slidesharecdn.com/chateaut-141101205614-conversion-gate02/85/cour-robotique-77-320.jpg)
![68
Modélisation géométrique des robots - Commande en position des
robots
2.4.7 Exemples de calcul de MGI
2.4.7.1 Calcul du MGI pour le robot AID-5
On se donne le système de coordonnées opérationnelles X.
On peut en déduire U0 =0 T6 =
sx nx ax Px
sy ny ay Py
sz nz az Pz
0 0 0 1
(2.94)
Il faut déterminer le système de coordonnées articulaires q.
On a :
U0 =0 T1
1T2
2T3
3T4
4T5
5T6 =0 T6
Uj =j Tj−1 Uj−1 permettant de déterminer dans l’ordre q1 à q6
(2.95)
Détermination de q1, q2, q3 Ce robot possède un poignet rotule.
Les premiers éléments du corps articulé forment les translations.
Les derniers éléments forment les rotations.
On a donc :
0P6 =0 P4 permettant de déterminer dans l’ordre q1 à q6 (2.96)
Px
Py
Pz
1
=0 T1
1T2
2T3
3T4
0
0
0
1
(2.97)
On a donc :
Px
Py
Pz
1
=
C1 [−S23 RL4 + C2 D3]
s1 [−S23 RL4 + C2 D3]
C23 RL4 + S2 D3
1
(2.98)
Ces relations ne permettent pas d’extraire directement q1, q2, q3.
Seul q1 pourrait être déterminé. En effet, d’après la relation précédente, par
identification des termes de droite et gauche on pourrait écrire :
q1 = ATAN 2(Py, Px) à π près (2.99)
Prémultiplication par 1T0
1T0
Px
Py
Pz
1
=
C1 Px + S1 Py
−S1 Px + C1 Py
Pz
1
(2.100)](https://image.slidesharecdn.com/chateaut-141101205614-conversion-gate02/85/cour-robotique-78-320.jpg)


![2.4 Modélisation géométrique inverse d’un robot 71
Calculons q3
D’après le dernier système d’équation, on a :
S3 = −
PzS2 + BC2 − D3
RL4
C3 = −
C2Pz + S2B
RL4
(2.116)
D’où
q3 = ATAN 2(S3,C3) (2.117)
Détermination de q4, q5, q6
L’orientation de U0 =0 T6 est 0A6 = [s n a] (2.118)
donc 3A0[s n a] =3 A6
– q1, q2, q3 étant connu 3A0 est connu
– [s n a] est l’orientation définie par le système de coordonnées opérationnelles.
C’est une donnée du problème.
– 3A6 ne dépend que de q4, q5, q6 qui sont inconnues
On a donc ici un système d’équations avec 3 inconnues.
On calcule le terme de gauche en déterminant d’abord
3A0 = (0A−1
3 ) = (0A3)T (2.119)
or 0A3 est la matrice de rotation de 0T3 c’est à dire
0T3 =0 T1
1T2
2T3 =0 T1
1T3 (2.120)
3T0 [s n a] =
C1 −S1 0 0
S1 C1 0 0
0 0 1 0
0 0 0 1
C23 −S23 0 C2D3
0 0 −1 0
S23 C23 0 S2D3
0 0 0 1
−1
.[s n a] (2.121)
D’où on en tire :
3A0 =
C23 0 S23
−S23 0 C23
0 −1 0
C1 S1 0
−S1 C1 0
0 0 1
(2.122)
3A0[s n a] = [3A0 s 3A0 n 3A0 a]
3A0 s =
C23 0 S23
−S23 0 C23
0 −1 0
C1 S1 0
−S1 C1 0
0 0 1
sx
|sy
sz
(2.123)](https://image.slidesharecdn.com/chateaut-141101205614-conversion-gate02/85/cour-robotique-81-320.jpg)
![72
Modélisation géométrique des robots - Commande en position des
robots
=
C23 0 S23
−S23 0 C23
0 −1 0
C1sx + S1sy
−S1sx + C1sy
sz
(2.124)
=
C23(C1sx + S1sy) + S23sz
−S23(C1sx + S1sy) + C23sz
S1sx − C1sy
(2.125)
De même on obtient
3A0 n =
C23(C1nx + S1ny) + S23nz
−S23(C1nx + S1ny) + C23nz
S1nx − C1ny
(2.126)
et
3A0 a =
C23(C1ax + S1ay) + S23az
−S23(C1ax + S1ay) + C23az
S1ax − C1ay
(2.127)
D’autre part 3A6 est la matrice de rotation de 3T6.
Elle peut être extraite de U3.
3A6 =
C4C5C6 − S4S6 −C4C5S6 − S4C6 −C4S5
S5C6 −S5S6 C5
−S4C5C6 − C4S6 S4C5S6 − C4C6 S4S5
(2.128)
Après analyse de 3A6 et q5, ne peut se déterminer que par l’utilisation de la fonction
Arcosinus. Cette fonction étant moins précise que ATAN2, on préfère utiliser 4A6
extraite à partir de U4.
4A6 =
C5C6 −C5S6 −S5
S6 C6 0
S5C6 −S5S6 C5
(2.129)
Il est donc nécessaire de calculer :
4A0(s n a) =4 A3
3A0(s n a) (2.130)
D’où
4A0 s =
C4 0 −S4
−S4 0 −C4
0 1 0
C23(C1sx + S1sy) + S23sz
−S23(C1sx + S1sy) + C23sz
S1sx − C1sy
(2.131)
=
C4[C23(C1sx + S1sy) + S23sz] − S4(S1sx − C1sy)
−S4[C23(C1sx + S1sy) + S23sz] − C4(S1sx − C1sy)
−S23(C1sx + S1sy) + C23sz
(2.132)
On en déduit 4A0 n et 4A0 a en remplaçant s par n puis a.
En identifiant le terme matriciel troisième colonne, deuxième ligne on a
−S4[C23(C1ax + S1ay) + S23az] − C4(S1ax − C1ay) = 0 (2.133)](https://image.slidesharecdn.com/chateaut-141101205614-conversion-gate02/85/cour-robotique-82-320.jpg)
![2.4 Modélisation géométrique inverse d’un robot 73
que l’on peut réécrire :
C4B1 + S4[C23B2 + S23az] = 0 (2.134)
avec B1 = S1ax − C1ay
B2 = C1ax + S1ay
(2.135)
C’est une équation type 2. On a 2 solutions :
q4 = ATAN2(B1,−C23B2 − S23az)
ou
q′4
= q4 + 180°
(2.136)
Pour q5, on utilise la troisième colonne ligne 1 et 3.
−S5 = C4[C23(C1ax + S1ay) + S23az] − S4(S1ax − C1ay)
C5 = −S23(C1ax + S1ay) + C23az
(2.137)
C’est une équation de type 3 :
On en déduit
q5 = ATAN2(S5,C5) (2.138)
Pour q6, on a la deuxième ligne des matrices (colonne 1 et 2).
Equations de type 2
S6 = −S4[C23(C1sx + S1sy) + S23sz] − C4[S1sx − C1sy]
C6 = −S4[C23(C1nx + S1ny) + S23nz] − C4[S1nx − c1ny]
(2.139)
On en déduit
q6 = ATAN2(S6,C6) (2.140)
On a donc une solution pour q5, q6, q2, q3 et deux solutions pour q4, q1
Soit un total de quatre solutions.
Le choix devra se faire sur des critères additifs.
Par exemple :
– éloignement des butées
– contrôle de l’espace occupé par le robot
– autre...
Remarque : il existe des positions singulières du robot
1. Si Px = Py = 0
Dans ce cas, q1 est indéterminé et O4 (centre de la route) ∈ à l’axe z0, z1.
On peut fixer par exemple :
q1 = q1c valeur courante de q1
ou
q1=le plus éloigné des butées électriques et mécaniques. Dans ce cas, il se
peut qu’une faible variation de la situation entraîne une grande variation de
q1 impossible à réaliser.](https://image.slidesharecdn.com/chateaut-141101205614-conversion-gate02/85/cour-robotique-83-320.jpg)
![74
Modélisation géométrique des robots - Commande en position des
robots
2. Si C23(C1ax + S1ay) + S23az = 0 et S1ax − C1ay = 0
Alors q4 est indéterminée.
Si S5 = 0 (résultat des hypothèses 2. Voir equation (2.138) page 73 pour le calcul
de q5)
alors les axes z4 et z6 sont confondus.
C’est donc la somme q4 + q6 qui intervient car q5 = 0
C’est une singularité de poignet.
Dans ce cas,
3A6 =3 A4
4A5
5A6 = A(x,−90°)A(z, q4 + q6) (2.141)
Comme q5 = 0 on ne passe pas par R5. 3A6 représente la matrice de rotation de U3 :
Or
U3 =
C4C5C6 − S4S6 −C4C5S6 − S4C6 −C4S5 0
S5C6 −S5S6 C5 RL4
−S4C5C6 − C4S6 S4C5S6 − C4C6 S4S5 0
0 0 0 1
(2.142)
U3/q5=0 =
C4C6 − S4S6 −C4S6 − S4C6 0 0
0 0 1 RL4
−S4C6 − C4S6 S4S6 − C4C6 0 0
0 0 0 1
(2.143)
U3/q5=0 =
C(4+6) −S(4+6) 0 0
0 0 1 RL4
−S(4+6) −C(4+6) 0 0
0 0 0 1
or3A6 =3 A6[s n a] (2.144)
D’où (deuxième colonne)
q4 + q6 = ATAN2[−C23(C1nx + S1ny) + S23nz − S1nx − C1ny] (2.145)
On peut fixer q4 à la valeur courante et q6 par la relation à dessus.
On peut aussi chercher que q4 et q6 soient le plus éloignées possible des butées.
2.4.7.2 MGI du robot ACMA H-80](https://image.slidesharecdn.com/chateaut-141101205614-conversion-gate02/85/cour-robotique-84-320.jpg)

![76
Modélisation géométrique des robots - Commande en position des
robots
– le mouvement n’est pas affecté pas le passage sur les configurations singulières,
– les contraintes de couples maximum et de vitesse maximum sont connues car
on les fixe aux limites physiques des actionneurs.
En contrepartie, la géométrie du déplacement du robot dans l’espace opération-nel
n’est pas controlée (bien qu’elle soit répétitive). Il y a donc risque de collision si
l’environnement est encombré. On en déduit que ce type de mouvement conviendra
d’avantage lorsque l’espace sera dégagé, et pour des déplacements rapides.
Lorsque la géométrie de la trajectoire doit être contrôlée, la génération de trajec-toire
dans l’espace opérationnel sera préférée. Par contre, elle comporte un certain
nombre d’inconvénients :
– elle demande d’appliquer le MGI en chaque point de la trajectoire,
– elle peut être mise en défaut lorsque la trajectoire calculée passe par une
position singulière,
– elle peut être mise en défaut lorsque la trajectoire calculée fait passer une
articulation hors de ces limites de variation q¬[qmin; qmax],
– les limites Cmax, Vmax étant définies dans l’espace opérationnel ne permettent
pas d’utiliser au mieux les actionneurs.
Le choix dépend essentiellement de la tâche à effectuer et de l’espace de travail.
espace articulaire espace opérationnel
rapide “moyennement” rapide
tâche espace de travail libre espace de travail encombré
(vitesses, couples, butées) (précision, obstacle)
2.5.2 Génération de mouvement dans l’espace articulaire
Soit un robot à n degrés de liberté.
Soit qi le vecteur des coordonnées articulaires initiales.
Soit qf le vecteur des coordonnées articulaires finales.
Soit kv le vecteur vitesse maximal.
Soit ka le vecteur accélération maximal.
Les caractéristiques kv, ka sont calculées en fonction de :
– kv : les caractéristiques des actionneurs et des rapports de réduction des or-ganes
de transmission,
– ka : le rapport des couples moteurs maximaux aux inerties maximales.
Le mouvement interpolé entre qi et qf en fonction du temps t est décrit par](https://image.slidesharecdn.com/chateaut-141101205614-conversion-gate02/85/cour-robotique-86-320.jpg)
![2.5 Commande en position d’un robot 77
l’équation suivante :
q = qi + r(t)D pour 0 ≤ t ≤ tf
.q
(t) =
.r
(t)D
(2.146)
avec D = qf − qi.
r(t) est une fonction d’interpolation telle que : r(0) = 0 et r(tf ) = 1. On peut
alors écrire 2.146 comme suit :
q(t) = qf (t) − [1 − r(t)]D (2.147)
Plusieurs fonctions permettent de satisfaire le passage par qi à t = 0 et qf à
t = tf :
– interpolation polynomiale linéaire, de degré 3 ou de degré 5
– loi du Bang Bang,
– loi trapèze (Bang Bang avec paliers de vitesse)
2.5.2.1 Interpolation polynomiale
Les 3 modes les plus courants sont l’interpolation linéaire, l’interpolation de degré
3 et l’interpolation de degré 5.
L’interpolation linéaire C’est la plus simple. L’équation du mouvement s’écrit :
q(t) = qi +
t
tf .D (2.148)
Cette loi de mouvement impose une vitesse constante le long de la trajectoire. Elle
est continue en position et discontinue en vitesse.
On en déduit la fonction d’interpolation :
r(t) =
t
tf
(2.149)
La loi est continue en position, mais discontinue en vitesse et accélération. On
obtient l’évolution suivante (fig 2.13).
Pratiquement, le début (t = 0) et la fin (t = tf ) sont marqués par des à-coups.](https://image.slidesharecdn.com/chateaut-141101205614-conversion-gate02/85/cour-robotique-87-320.jpg)

![2.5 Commande en position d’un robot 79
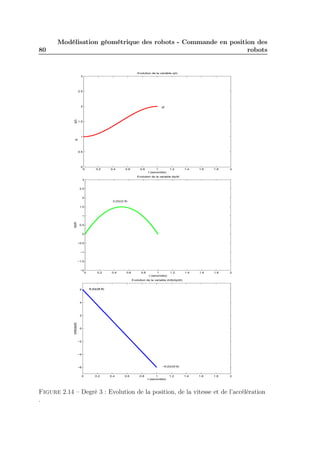
L’interpolation de degré 3 [Craig86] Si l’on impose une vitesse nulle aux points
de départ et d’arrivée, on rajoute deux contraintes supplémentaires par rapport à
l’interpolation linéaire. Afin de satisfaire ces 4 contraintes,
q˙i = q˙(0) = 0 (a)
q˙f = q˙(tf ) = 0 (b)
q(0) = qi (c)
q(tf ) = qf (d)
le degré minimal du polynôme est de 3. La forme générale est donnée par l’équa-tion
suivante :
q(t) = a0 + a1.t + a2.t2 + a3.t3 (2.150)
On en déduit les relations donnant la vitesse et l’accélération :
q˙ = a1 + 2.a2.t + 3.a3.t2
¨q = 2.a2 + 6.a3.t
(2.151)
En utilisant les hypothèses (a) et (c), on en déduit les coefficients :
a0 = qi
a1 = 0
(2.152)
On en déduit la fonction d’interpolation :
r(t) = 3.
t
tf
2
− 2.
t
tf
3
(2.153)
En utilisant les hypothèses (b) et (d), on obtient un système de deux équations
et deux inconnues. On en déduit les coefficients :
(
a2 = 3
t2f
.D
a3 = − 2
t3f
.D
(2.154)
L’accélération s’annule lorsque t = −2.a2
6.a3
=
2.3.t3f
t2f
.6.2 = tf
2 . Elle a donc un maximum
en t = 0 et minimum en t = tf . La valeur extrèmale est : ¨qmax = 6.|D|
t2f
La vitesse est maximale en t = tf
2 et nulle en t = 0 et en t = tf . La valeur
extrèmale est : q˙max = 3.|D|
2.tf
.
On obtient l’évolution suivante (fig 2.14).](https://image.slidesharecdn.com/chateaut-141101205614-conversion-gate02/85/cour-robotique-89-320.jpg)
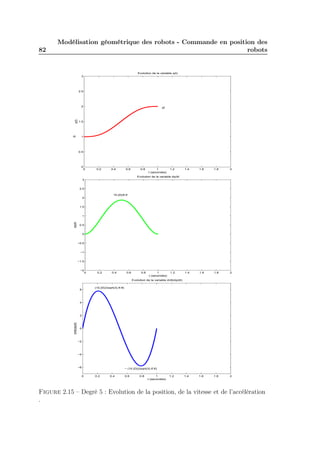
![2.5 Commande en position d’un robot 81
L’interpolation de degré 5 [Binford77]
Si de plus l’on impose une accélération nulle aux points de départ et d’arrivée, on
rajoute deux contraintes supplémentaires par rapport à l’interpolation de degré 3.
Afin de satisfaire ces 6 contraintes,
¨qi = ¨q(0) = 0 (a)
¨qf = ¨q(tf ) = 0 (b)
q˙i = q˙(0) = 0 (c)
q˙f = q˙(tf ) = 0 (d)
q(0) = qi (e)
q(tf ) = qf (f)
le degré minimal du polynôme est de 5. La forme générale est donnée par l’équa-tion
suivante :
q(t) = a0 + a1.t + a2.t2 + a3.t3 + a4.t4 + a5.t5 (2.155)
On en déduit les relations donnant la vitesse et l’accélération :
q˙ = a1 + 2.a2.t + 3.a3.t2 + 4.a4.t3 + 5.a5.t4
¨q = 2.a2 + 6.a3.t + 12.a4.t2 + 20.a5.t3 (2.156)
En utilisant les hypothèses (e), (c) et (a), on en déduit les coefficients :
a0 = qi
a1 = 0
a2 = 0
(2.157)
En utilisant les hypothèses (f), (d) et (b), on obtient un système de trois équa-tions
et trois inconnues. On en déduit les coefficients :
a3 = 10
t3f
.D
a4 = −15
t4f
.D
a5 = 6
t5f
.D
(2.158)
On en déduit la fonction d’interpolation :
r(t) = 10.
t
tf
3
− 15.
t
tf
4
+ 6.
t
tf
5
(2.159)
L’accélération s’annule lorsque t = tf
2 . Elle a un maximum et un minimum :
¨qmax = 10.|D| √3.t2f
¨qmin = −10.|D| √3.t2f
La vitesse est maximale en t = tf
2 et nulle en t = 0 et en t = tf . La valeur
extrèmale est : q˙max = 15.|D|
8.tf
.
On obtient l’évolution suivante (fig 2.15).](https://image.slidesharecdn.com/chateaut-141101205614-conversion-gate02/85/cour-robotique-91-320.jpg)


![2.5 Commande en position d’un robot 85
Remarque : temps minimum .
Si tf n’est pas spécifié, on recherche en général le temps minimum pour faire le
déplacement qi → qf en respectant les contraintes de vitesse et d’accélération.
Généralement on calcul le temps minimum sur chaque articulation séparemment
puis on effectue la coordination des articulations sur un temps commun. La coordi-nation
est nécessaire à deux titres :
– harmonie du mouvement global du robot
– contrôle de la trajectoire et de la géométrie du robot.
Les deux étapes sont donc :
– calcul du temps minimum tf : il dépend de la méthode d’interpolation retenue.
Il consiste en fait à saturer la vitesse et/ou l’accélération. Pour le calcul de
chacun des tfj , on se sert des résultats suivants :
Interpolation linéaire tfj = |Dj |
kvj
Interpolation de degré 3 tfj = MAX
h
3·|Dj|
2·kvj
,
q
6·|Dj |
kaj
i
Interpolation de degré 5 tfj = MAX
h
15·|Dj |
8·kvj
,
q
10·|D √ j | 3·kaj
i
Loi Bang-Bang tfj = MAX
h
2·|Dj |
kvj
, 2 ·
q
|Dj |
kaj
i
– Pour la coordination des axes, on impose pour chaque axe tf =
MAX[tf1, tf2, · · · tfn].](https://image.slidesharecdn.com/chateaut-141101205614-conversion-gate02/85/cour-robotique-95-320.jpg)



![2.5 Commande en position d’un robot 89
L’aire du trapèze représentant l’évolution des vitesses, est égale à la distance
parcourue dans l’intervalle [0; tfj ]. On a donc :
|Dj| = |qf
j − qij
| = 2 ·
R j
0 kaj · t · dt +
R tfj−j
j
kvj · dt
|Dj| = kvj · tfj − kvj
2
kaj
(2.170)
On en déduit le temps minimal pour l’axe j.
(
tfj = kvj
kaj
+ |Dj|
kvj
tfj = τj + +|Dj|
kvj
(2.171)
Pour synchroniser les différents mouvements des axes 1, 2, · · · , n deux méthodes ont
été proposées.
Méthode du temps minimal [Tondu 84]
Dans cette méthode le temps optimal tf = Maxj [tfj ] est conservé. Soit k
l’articulation contraignante imposant tf = tfk.
L’articulation j est synchronisée par rapport à sa loi propre en augmentant la
durée du palier de vitesse. Les phases d’accélération et de déccélération restant
identiques à celles de la loi propre.
La loi synchronisée s’obtient en réalisant une homothétie d’un rapport λj sur sa
loi propre. On obtient l’évolution suivante (fig 2.19).
kvj
lambdaj . kvj
Loi propre
Loi homothétique rapport lambdaj
kaj
0 0.2 0.4 0.6 0.8 1 1.2 1.4 1.6 1.8 2
2
1.5
1
0.5
0
−0.5
−1
Evolution de la variable dq/dt
dt
dq/lambdaj . kaj
t (secondes) tfj tfk
t
Figure 2.19 – Loi trapèze : Evolution de la vitesse
.
tf = τj + |Dj |
j ·kvj
représente la durée de synchronisation. En fait, τj reste constant.
On peut reprendre le calcul de l’intégrale précédent en introduisant λj . Comme :](https://image.slidesharecdn.com/chateaut-141101205614-conversion-gate02/85/cour-robotique-99-320.jpg)


![92
Modélisation géométrique des robots - Commande en position des
robots
τ1 = 1·kv1
1·ka1
τ2 = 2·kv2
2·ka2
et tf = MAX[tf1, tf2]
On doit calculer λj et νj pour rendre tf minimum. On veut un τ fixe. On a donc :
τ = τ1 = τ2 =
λ1 · kv1
ν1 · ka1
=
λ2 · kv2
ν2 · ka2
(2.177)
De plus, comme τ = τ1 = τ2 et tf = tf1 = tf2, on a :
|D1|
λ1 · kv1
= |D2|
λ2 · kv2
(2.178)
On en déduit deux relations :
kv2 · |D2|
λ2 = λ1 · kv1
|D1|
ka2 · |D2|
ν2 = ν1 · ka1
|D1|
(2.179)
Pour satisfaire les contraintes de vitesse, on a :
0 ≤ λ1 ≤ 1
0 ≤ λ2 ≤ 1 ⇒ 0 ≤ λ1 ≤
kv2
kv1 · |D1|
|D2|
(2.180)
Pour satisfaire les contraintes d’accélération, on a :
0 ≤ ν1 ≤ 1
0 ≤ ν2 ≤ 1 ⇒ 0 ≤ ν1 ≤
ka2
ka1 · |D1|
|D2|
(2.181)
Le temps tf minimum est obtenu lorsque λ1 et ν1 sont les plus grands et satisfont
les contraintes suivantes :
λ1opt = MIN
h
1, kv2
kv1 · |D1|
|D2|
i
ν1opt = MIN
h
1, ka2
ka1 · |D1|
|D2|
i (2.182)
Dans ce cas la durée optimale de la phase d’accélération est :
τopt =
λ1opt
ν1opt ·
kv1
ka1
(2.183)](https://image.slidesharecdn.com/chateaut-141101205614-conversion-gate02/85/cour-robotique-102-320.jpg)

![94
Modélisation géométrique des robots - Commande en position des
robots
2.5.3 Génération de mouvement rectiligne dans l’espace opé-rationnel
Nous nous restreindrons à ce type de mouvement car la génération de mouve-ment
dans l’espace opérationnel devient vite complexe.
On cherche à appliquer un mouvement rectiligne au point outil (OE origine du
repère RE lié à l’outil).
Soit OTE
i la matrice de transformation homogène décrivant la situtation initiale
de l’outil dans le repère R0.
Soit OTE
f la matrice de transformation homogène décrivant la situtation finale
de l’outil dans le repère R0.
On définit : OTE
i =
Ai Pi
0 1
OTE
f =
Af Pf
0 1
On décompose le mouvement en un mouvement de :
– rotation autour d’un axe u de l’organe terminal pour aligner Ai avec Af ,
– translation en ligne droite entre les origines OE
i et OE
f .
Les deux mouvements se terminent en même temps.
On a donc :
OTE
f =O TE
i · T(u, θ) =
Ai Pi
0 1
·
A(u, θ) P
0 1
(2.185)
Soit :
– kv1 et ka1 les vitesses et accélérations maximales pour la rotation
– kv2 et ka2 les vitesses et accélérations maximales pour la translation
Le calcul de u et θ est obtenu à partir de la relation suivante :
Ai.A(u, θ) = Af (2.186)
A(u, θ) représente une rotation d’un angle θ autour d’un axe u.
A(u, θ) = [Ai]T · Af =
si
ni
ai
·
sf nf af
(2.187)
A(u, θ) =
si · sf si · nf si · af
ni · sf ni · nf ni · af
ai · sf ai · nf ai · af
(2.188)](https://image.slidesharecdn.com/chateaut-141101205614-conversion-gate02/85/cour-robotique-104-320.jpg)



Le document traite de la géométrie et de la cinématique en robotique, en abordant les transformations homogènes et la modélisation géométrique des robots. Il couvre des sujets tels que la description des structures robotiques, la commande en position et le calcul des modèles géométriques directs et inverses. Des éléments théoriques et des exemples pratiques sont inclus pour illustrer les concepts discutés.