Télécharger pour lire hors ligne
















![Contrôle et Commande d’un système à distance via GSM « Smart Traffic Signs » PFE 2020
20 ENSAM Rabat
I. Étude de la partie matérielle
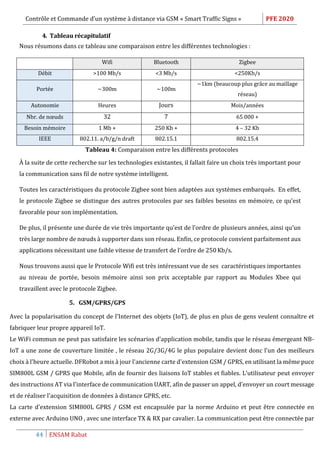
On va aborder dans cette partie les différents organes utilisés dans notre système intelligent.
1. Choix de la carteprogrammable
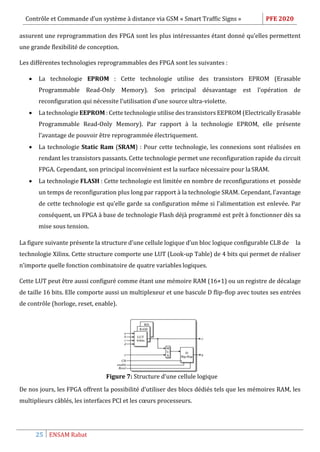
Dans cette partie nous avons cités les différents types de cartes programmables et ses caractéristiques
dont le but de sélectionner la plus optimale pour notre projet.
a. Carte RASPBERRY_PI
Le Raspberry PI rappelle quelque peu l'Arduino (on va l’aborder par la suite), un circuit imprimé dont
les plans sont publiés sous licence libre sur lequel se trouve un microcontrôleur programmable et
objet fétiche des partisans de l'open hardware.
Physiquement, il s'agit d'une carte mère seule avec un processeur ARM11 à 700 MHz. Elle inclut 1, 2
ou 4 ports USB, un port RJ45 et 256 Mo de mémoire vive pour le modèle d'origine (512 Mo sur les
dernières versions).
Figure 3: Raspberry_Pi
i. Spécifications techniques
Parmi ses caractéristiques matérielles, on cite :
Taille : 85.60 mm × 53.98 mm ;
Poids : 45 g ;
Processeur : 700 MHz ARM1176JZF-S Core (ARM11) ;
Système sur puce (Soc) : Broadcom BCM2835 ;
Processeur graphique (GPU) : décodeur Broadcom VideoCore IV, API logicielle vidéo
OpenGL ES 2.0, MPEG-2 et VC-1, décodage vidéo 1080p30 h.264/MPEG-4 AVC ;
Mémoire (SDRAM) : 256 Mo [Modèle A] ou 512 Mo [Modèle B] partagée avec le processeur
graphique ;
Ports USB 2.0 : 1 [Modèle A] ou 2 [Modèle B] ;
Sortie vidéo : RCA Composite (PAL et NTSC) et HDMI (rev 1.3 & 1.4)
Sortie audio : 3.5 mm jack, HDMI](https://image.slidesharecdn.com/pfepsigribissbouchta-210528101523/85/Pfe-psi-gribiss-bouchta-21-320.jpg)
![Contrôle et Commande d’un système à distance via GSM « Smart Traffic Signs » PFE 2020
21 ENSAM Rabat
Réseau : 1 port réseau Fast Ethernet (10/100 Mbits/s) sur le [Modèle B]] uniquement;
Périphériques bas niveau : 8 × GPIO 1, UART, bus I²C, bus SPI ;
Besoin en alimentation : 5 volt via MicroUSB ou GPIO 3; 300 mA (1.5 W) [Modèle A] ou 700 mA
(3.5 W) [Modèle B].[5
Même si à la base le Raspberry_PI est un gadget, il a suffisamment de capacités (512 Mo de mémoire,
circuit graphique BMC Videocore 4) et de sorties (ports USB, Ethernet) pour convenir à différentes
utilisations : serveur, pare-feu... Certains l'ont même transformé en Super Nitendo, en alarme, émetteur
radio FM, en liseur vocal de texte ou carrément en mini-hélicoptère.
Il pourrait convenir pour petite machine bureautique, mais même s'il permet de lire correctement des
vidéos, il est encore très utile dans les applications à distance.
ii. Système d'exploitation
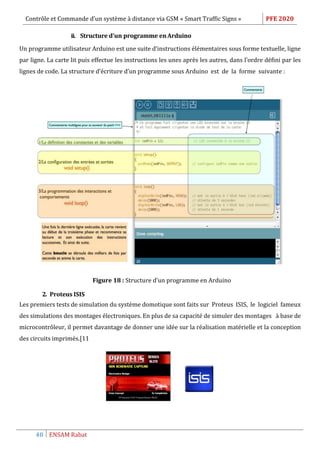
La fondation Raspberry_PI recommande d'utiliser Raspbian, une distribution GNU/Linux optimisée
pour le matériel du Raspberry_PI (Raspbian est basée sur Debian).
D’autres distributions GNU/Linux ont été testées avec succès avec le Raspberry_PI. C'est le cas de
Slackware, Arch et Gentoo dans leur version destinée aux processeurs ARM. Red Hat recommande
d'utiliser Raspberry_PI, Fedora, Remix et les debianeux s'orienteront vers Raspbian.
Android fonctionne également sur le Raspberry_PI, tout comme FreeBSD et NetBSD.
Figure 4: Interface graphique du Raspbian
iii. Boîtier
Le Raspberry_PI étant une carte mère, elle est extrêmement légère et les câbles ne facilitent pas toujours
sa stabilisation. De plus, son exposition à l'air libre risque de l'abîmer.
3
General Purpose Input Output" ce que l'on traduirait par Entrée/sortie pour usage général](https://image.slidesharecdn.com/pfepsigribissbouchta-210528101523/85/Pfe-psi-gribiss-bouchta-22-320.jpg)
























![Bibliographie
[1] https://www.cortesia-formations.fr/actualites/prescription-delits-routiers-
changements/
https://www.total-fleet.fr/fr/actus-conseils/mobilite-innovations/panneaux-routiers-20-
ils-ont-de-quoi-vous-surprendre
[2] Transportation Research Part C: Emerging Technologies Volume 68, July 2016,
Pages 168-184
[3] Elhammoumi. A, Slimani. M, "Conception et réalisation d’un prototype d’une maison
domotique intelligente", Mémoire Master Académique, Université Hassan 1er Faculté
des Sciences et Technique, Maroc, 2016.
[4] https://www.android-mt.com/news/raspberry-pi-4-fiche-technique/82427/
[5]http://proxacutor.free.fr/#:~:text=Pr%C3%A9sentation%20rapide%3A%20Les%20FP
GA%20(Field,notablement%20certaines%20phases%20de%20calculs.
[6] http://tpe-robotique-exosquelette.e-monsite.com/pages/tpe/fonctionnement/micro-
controleur-arduino.html
[7] Description-de-la-Carte-Arduino-UNO.pdf
_carte_Arduino_UNO.pdf
arduino-pour-bien-commencer-en-electronique-et-en-programmation.pdf
[8] https://letmeknow.fr/shop/fr/blog/94-tuto-module-gsm-sim800l-prise-en-
main#:~:text=Le%20module%20GSM%20SIM800L%20est,radio%20FM%20(r%C3%A9ce
pteur%20uniquement).
[9] https://www.amazon.fr/Sim800l-Quadribande-Embarqu%C3%A9e-Antenne-
Arduino/dp/B01FQPLG9W
[10] https://www.electronique-mixte.fr/wp-
content/uploads/2018/06/Formation_Programmation_Arduino_cours_8.pdf
[11]https://www.researchgate.net/publication/288327838_Conception_et_realisation_d'u
ne_centrale_embarquee_de_la_domotique_Smart_Home
[12] https://www.linuxembedded.fr/2016/03/protocoles-de-communication-
frameworks-et-systemes-dexploitation-pour-les-objets-connectes/
[13] https://www.domotique-info.fr/technologies-domotique/zigbee/
[14] Arduino Bluetooth androïde example code pdf](https://image.slidesharecdn.com/pfepsigribissbouchta-210528101523/85/Pfe-psi-gribiss-bouchta-58-320.jpg)

Ce document présente un projet de maîtrise en génie électrique portant sur le contrôle et la commande de panneaux de signalisation routière intelligents via GSM. Le projet vise à améliorer la sécurité routière et l'efficacité des transports en intégrant des systèmes de communication dans l'infrastructure routière. Il détaille les aspects matériels et logiciels du système proposé ainsi que les méthodes de communication utilisées.





































