Téléchargé 145 fois








![Chapitre 1 : Contexte du projet
2
I. Introduction
Il s’agit en fait de réaliser une combinaison entre l’informatique et l’électronique que nous
avons eu l’occasion d’accomplir au sein de l’Institut Supérieur de l’Informatique et de
Multimédia de Sfax. Nous allons dans ce qui suit ces deux types de systèmes.
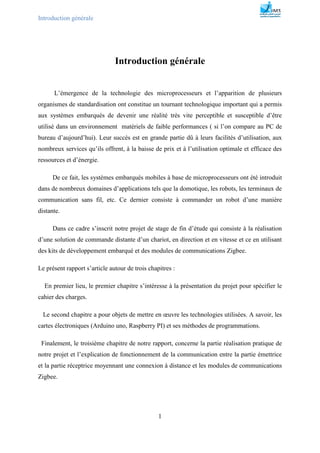
- Système électronique : Un système électronique est un système opérant sur de
faibles courants. Il se compose essentiellement d'un calculateur câblé ou programmé,
et est relié sur son entrée à des capteurs et sur sa sorties à des actionneurs [1].
-Figure N°1 : Système électronique-
- Système informatique : Un système informatique est un ensemble d'équipements
destinés au traitement automatique de l'information [2].
Sur la figure 2, nous représentons les différentes parties d’un système informatique.
-Figure N°2 : Système informatique-
- Système embarqué : Un système électronique embarqué est un système électronique et
informatique autonome associant un regroupement de fonctionnalité tel le
conditionnement, l'acquisition de signaux issus de capteurs, le traitement
d'information, le contrôle des actionneurs et aussi le stockage et le transfert
d'information filaire ou radio [3].
Périphériques de sortie :
Imprimante, écran, …
Organes de stockage :
Disque dur, clé USB, …
Périphériques d’entrée :
Clavier, souris, …
Unité de
traitement](https://image.slidesharecdn.com/rapportinterfaceterminal-160522222549/85/Rapport-interface-terminal-14-320.jpg)
![Chapitre 1 : Contexte du projet
3
II. Contexte
Les systèmes informatiques embarqués sont devenus ces dernières années de plus en plus
complexes, requérant une pluridisciplinarité très large, pour des applications toujours plus
nombreuses. Les applications initiales des systèmes embarqués étaient essentiellement le
spatial et l’aéronautique, pour ensuite devenir des outils de base pour la téléphonie, le
transport, la santé, le commerce électronique, l’éducation, la domotique... autrement dit des
enjeux stratégiques importants. Des disciplines comme la conception de logiciel, les systèmes
et les réseaux sont devenues très importantes pour la conception des systèmes embarqués.
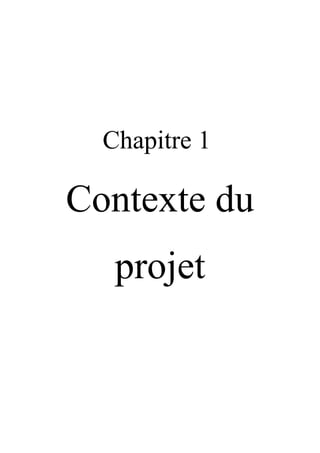
Pour une description des domaines d’utilisation des systèmes embarqués on site, par
exemple la domotique. Comme le montre la figure 3, la domotique est l'ensemble des
technologies qui contrôle nos appareils de la maison via un Smartphone, une tablette ou un
ordinateur c'est ce qu'on appelle de la domotique [4]. Ces objets connectés se contrôlent à
distance et apportent du bien-être et de la sécurité à ses utilisateurs.
-Figure N°3 : Application domotique-
Les systèmes embarqués sont aujourd’hui présent partout autour de nous, on les retrouve
dans les domaines de transport, de l’industrie, la robotique et bien d’autres.](https://image.slidesharecdn.com/rapportinterfaceterminal-160522222549/85/Rapport-interface-terminal-15-320.jpg)


![Chapitre 2 : Les technologies utilisées
8
I. Technologies de communication
Quand il s'agit de concevoir des systèmes embarqués, interactifs ou bien quand des objets
doivent communiquer entre eux, plusieurs techniques de communication sont envisageables,
parmi eux celles sans fil qui offrent de la mobilité, l’un des aspects principaux des systèmes
embarqués. Dans ce paragraphe nous allons faire le point sur les technologies de
communication sans fil.
1. Communication sans fils
Il existe plusieurs techniques de communication sans fil qui sont différentes en matière de
caractéristiques. Entre autres, le débit offert ainsi que la couverture.
1.1. GSM
Le réseau GSM constitue au début du 21ème siècle le standard de téléphonie mobile le plus
utilisé en Europe. Il s'agit d'un standard de téléphonie dit « de seconde génération » (2G) car,
contrairement à la première génération de téléphones portables, les communications
fonctionnent selon un mode entièrement numérique [5].
1.2. Infrarouge
Le rayonnement infrarouge est le rayonnement électromagnétique dont la longueur d'onde
est comprise entre 700 nanomètres et 1 millimètre. Ainsi, il se situe entre la limite rouge du
spectre visible et les plus courtes micro-ondes. Tous les corps dont la température est
supérieure au zéro absolu émettent un rayonnement infrarouge [6].
1.3. Bluetooth
Le Bluetooth est un protocole de connexion sans fil à courte portée qui ne dépasse pas une
dizaine de mètres. Par l'intermédiaire de celui-ci, il est possible de connecter différents
appareils entre eux (ordinateurs, téléphones portables...) [7].](https://image.slidesharecdn.com/rapportinterfaceterminal-160522222549/85/Rapport-interface-terminal-21-320.jpg)
![Chapitre 2 : Les technologies utilisées
9
1.4. Wi-Fi
Le Wi-Fi est un ensemble de protocoles de communication sans fil régi par les normes du
groupe IEEE 802.11. Un réseau Wi-Fi permet de relier sans fil plusieurs appareils
informatiques avec un débit élevé (3Mbits/s) et 100m comme zone de
couverture (ordinateur, routeur, décodeur Internet, etc.) au sein d'un réseau informatique afin
de permettre la transmission de données entre eux [8].
1.5. 3G
La troisième génération (3G) désigne une génération de normes de téléphonie mobile. Elle
est représentée principalement par les normes Universal Mobile Télécommunications
System (UMTS ) , permettant des débits qui sont bien plus rapides qu'avec la génération
précédente, par exemple le GSM [9].
Les premières applications grand public de la 3G sont l'accès à Internet, le visionnage de
vidéos, voire d'émissions de télévision et la visiophonie .
1.6. Uwb
L’UWB, (en français ULB) est une technique de modulation radio qui est basée sur la
transmission d'impulsions de très courte durée. L’UWB peut être utilisé en tant que technique
de communication sans fil, qui fournit des taux de transfert réseaux très élevés sur des
distances relativement courtes et à faible puissance [10].
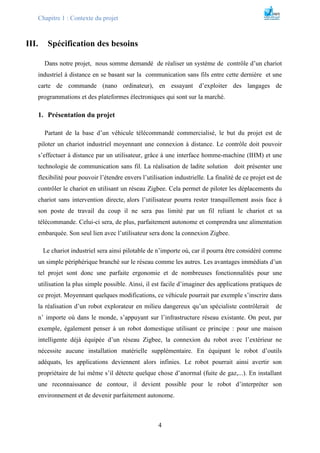
1.7. Zigbee
Zigbee est un protocole de haut niveau permettant la communication de petites radios, à
consommation réduite, basée sur la norme IEEE 802.15.4 pour les réseaux à dimension
personnelle (WPAN). Cette technologie a pour but la communication de courte distance telle
que le propose déjà la technologie Bluetooth, tout en étant moins chère et plus simple [11].
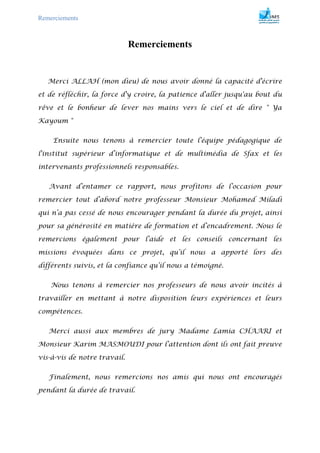
Nous situons sur la figure 7, la technologie de communication Zigbee par rapport aux autres.](https://image.slidesharecdn.com/rapportinterfaceterminal-160522222549/85/Rapport-interface-terminal-22-320.jpg)
![Chapitre 2 : Les technologies utilisées
10
-Figure N °7 : Zigbee par rapport aux autres protocoles sans fils –
Les avantages de Zigbee :
La principale caractéristique de cette technologie est sa très faible consommation. Celle-ci
permet à Zigbee d'être aujourd'hui présente dans les environnements embarqués. Zigbee est
également de plus en plus présente dans les contrôles industriels ou dans certaines
applications médicales. On peut enfin retrouver Zigbee dans de nombreux capteurs et
télécommandes à l'usage plus quotidien. Zigbee équipe ainsi la télécommande de certains
modems Internet.
2. Module de communication Xbee
L’un des modules de communication permettant la communication Zigbee, nous trouvons les
modules Xbee que nous les traitons dans le paragraphe suivante.
2.1. Définition
Les modules Xbee sont des modules de communication sans fil très populaires, fabriqués
par l'entreprise Digi International, et qui utilise le protocole zigbee qui est un protocole de
communication par ondes radios [12].
Sur la figure 8, nous présentons l’image du module Xbee que nous allons utiliser dans notre
application de commande.](https://image.slidesharecdn.com/rapportinterfaceterminal-160522222549/85/Rapport-interface-terminal-23-320.jpg)

![Chapitre 2 : Les technologies utilisées
12
Pour établir une communication avec l'ordinateur, il suffit de mettre en place une
communication série entre ce module et un ordinateur de bureau ou embarqué. Il faut alors
adopter les signaux entre le module et l’ordinateur de configuration.
II. Les kits de développement
1. Environnement Arduino
1.1 Vue d’ensemble
Les modules Arduino sont des plates-formes de prototypage micro contrôlées "open-
source" spécialement conçues pour les artistes, les concepteurs et toute personne intéressée
par la création d'objets ou environnements interactifs [13].
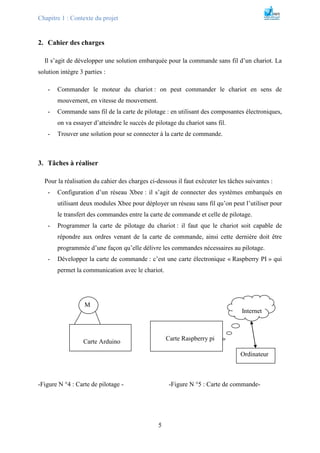
L’Arduino propose plusieurs types de cartes de développement qui se présentent sous forme
de circuit imprimé sur lequel se trouve un microcontrôleur pour analyser et produire des
signaux électriques de manière à effectuer des tâches très diverses comme la domotique, la
robotique et tous types d’applications embarqués. Nous imagions sur la figure 10, la carte
Arduino de type Uno qui est construite autour d’un microcontrôleur de type Atmega 1280.
-Figure N°10 : Carte Arduino uno –
Une carte Arduino Uno présente les interfaces suivantes :
Port USB.
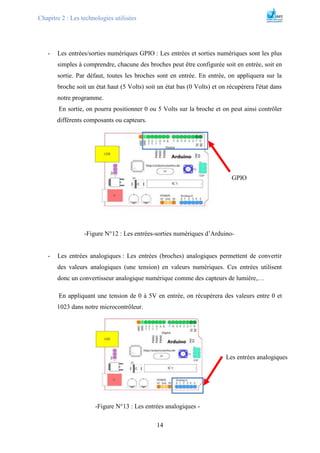
14 entrées/sorties numériques GPIO.
6 entrées analogiques.](https://image.slidesharecdn.com/rapportinterfaceterminal-160522222549/85/Rapport-interface-terminal-25-320.jpg)

![Chapitre 2 : Les technologies utilisées
15
1.3 Partie logicielle
Le logiciel de programmation des modules Arduino est une application Java, libre et
multiplateforme, servant d'éditeur de code et de compilateur, et qui peut transférer
le firmware et le programme au travers de la liaison série (RS-232, Bluetooth ou USB selon le
module). Il est également possible de se passer de l'interface Arduino, et de compiler et
charger les programmes via l'interface en ligne de commande.
Le langage de programmation utilisé est le C++ et lié à la bibliothèque de développement
Arduino, permettant l'utilisation de la carte et de ses entrées/sorties. La mise en place de ce
langage standard rend aisé le développement de programmes sur les plates-formes Arduino, à
toute personne maîtrisant le C ou le C++.
2. L’environnement Raspberry Pi
Dans ce paragraphe nous mettons en revue l’environnement Raspberry PI que nous allons
adopter comme ordinateur d’envoie.
2.1 Vue d’ensemble
Le Raspberry Pi est une nano-ordinateur mono-carte à processeur ARM (puissant et a faible
consommation), permet l'exécution de plusieurs variantes du système d'exploitation libre
GNU/Linux [14].
Sur les figures 14 et 15 nous illustrons les différents composants et interfaces de ce mini
ordinateur.
-Figure N° 14 : Diagramme en blocs d’une carte Raspberry pi-](https://image.slidesharecdn.com/rapportinterfaceterminal-160522222549/85/Rapport-interface-terminal-28-320.jpg)

![Chapitre 2 : Les technologies utilisées
17
2.3 Partie logicielle de Raspberry PI
La carte Raspberry PI est un système informatique miniaturisé, qui supporte plusieurs
variantes de systèmes d’exploitation dont nous détaillons les suivants. Elle reçoit la
distribution Linux Debian, qui est universellement considérée comme la plus difficile, c’est
pourquoi nous ne manquerons de rien, toute la distribution se trouve sur une carte SD, y
compris le système d’exploitation, et si par hasard on effectue une opération irréversible,
aucune crainte, on peut restaurer la SD et repartir à nouveau. Pour cela, sur ce système nous
allons tourner notre application distante à fin de le télécharger à partir de la carte Raspberry
PI.
III. Les langages de programmation
Il existe plusieurs langages de programmation dont nous décrivons brièvement ceux que
nous allons adopter pour aboutir à notre réalisation. Nous catégorisons ces langages suivant la
partie où nous les adopterons.
1. Programme embarqué
Il s’agit du programme qui va recevoir les commandes de pilotage du moteur du chariot
captées par le module de communication Xbee. Le programme est écrit dans le langage
Arduino puisque notre carte est de type Arduino. Ce langage est très proche du C et du C++.
Il contient des bibliothèques qui sont une collection de code qui le rend facile pour se
connecter à un capteur, affichage, module, etc… [15].
2. Script de communication
Pour configurer le module de communication Xbee et le piloter via des commandes AT, il
est possible d’utiliser plusieurs langages comme le python que nous l’adoptons dans notre cas.
Python : Python est un langage de programmation objet multiplateformes. Il favorise la
programmation impérative structurée et orientée objet, c’est un langage clair et puissant et
comparable à Perl et Java [16].
A cause de l’évolution des langages de programmations, nous sommes obligés de savoir
comment nous choisissons le langage convenable pour achever l’exécution parfaite de ce que
nous voulons.](https://image.slidesharecdn.com/rapportinterfaceterminal-160522222549/85/Rapport-interface-terminal-30-320.jpg)









![Chapitre 3 : Réalisation
27
3. Installation du logiciel de connexion à distance ‘putty’
Putty est un émulateur de terminal doublé d'un client pour les protocoles SSH, Telnet
et rlogin. Il permet également d'établir des connexions directes par une liaison série RS-232.
C'est un logiciel libre distribué selon les termes de la licence MIT.
-Figure N°31 : Icône et interface de ‘putty’-
4. Réalisation de montage électronique
Pour que le chariot soit en marche, il faut que nous réalisions un montage électronique bien
déterminé pour rendre compatible les organes de commande au moteur utilisé.
4.1 Composants électroniques
- Résistance : Une résistance est un composant électrique dont la principale
caractéristique est d'opposer une plus ou moins grande résistance (mesurée en ohms) à
la circulation du courant électrique [17].
Nous allons utiliser des résistances de diviseur de tension pour adapter la communication
série entre l’Arduino et le module Xbee comme le montre le montage de la figure 32.](https://image.slidesharecdn.com/rapportinterfaceterminal-160522222549/85/Rapport-interface-terminal-41-320.jpg)
![Chapitre 3 : Réalisation
28
-Figure N° 32 : Montage de diviseur de tension-
D’après la datasheet, la communication série dépasse un courant de 0,2 mA.
Calcul des résistances :
Utx Ard= UR1+UR2=I (2R1+3R2)
- Transistor : Un transistor est un dispositif semi-conducteur à trois électrodes actives,
qui permet de contrôler un courant (ou une tension) sur une des électrodes de sorties
(le collecteur) grâce à une électrode d'entrée (la base) [18].
Et comme nous montre la figure 33, un schéma qui décrire ses trois bornes.
-Figure N° 33 : Schéma d’un transistor-
Nous allons utiliser le transistor en mode commutation pour commander la bobine du relais
comme l’indique le schéma de la figure 34.
R1
1
R2
2
10 K ohm
15 K ohm
TX de l’Arduino
RX de Xbee](https://image.slidesharecdn.com/rapportinterfaceterminal-160522222549/85/Rapport-interface-terminal-42-320.jpg)
![Chapitre 3 : Réalisation
29
-Figure N° 34 : Transistor en mode commutation-
Un autre transistor va être adapté en mode commutation pour adapter les signaux PWM de
commande généré par la sortie de la carte Arduino.
- Relais : appareil traversé par un courant électrique dans le but d'ouvrir ou de fermer un
circuit électrique. C'est en quelque sorte un interrupteur que l'on peut actionner à
distance, et où la fonction de coupure est dissociée de la fonction de commande [19].
Nous montrons respectivement sur la figure 35 le schéma électrique d’un relais.
-Figure N° 35 : Schéma électrique d’un relais-
- Régulateur : C’est un organe électrotechnique ou un composant électronique qui
maintient à sa sortie, dans certaines limites, une tension constante, indépendamment
de la charge et de la tension d'entrée [20].
Dans notre cas, nous allons réguler la tension 12V pour en avoir une tension de 5V
qui est nécessaire à notre moteur du chariot qui est un moteur à courant continu.
1
2
3 4
5
6 7
8
Sortie
Commande relais
Diode en roue libre :
pour ne pas abimer
la bobine du relais
en coupant le
courant
brusquement.](https://image.slidesharecdn.com/rapportinterfaceterminal-160522222549/85/Rapport-interface-terminal-43-320.jpg)










![Bibliographie
41
Bibliographie
[1] http://www.alyotech.fr/sei_intro
[2] http://www.labo-microsoft.org/def/13960/
[3] http://www.mind-microtec.org/domaines-dapplication/systeme-electronique-embarque
[4] http://www.cnetfrance.fr/produits/domotique-10-objets-connectes-pour-une-maison-
intelligente-39789608-la-domotique-c-est-fantastique_1.htm
[5] http://www.commentcamarche.net/contents/1122-le-standard-gsm
[6] http://www.hgh.fr/rayonnement-infrarouge-corps-noir-infrared-radiation-blackbody.php
[7] http://www.evalu.it/glossaire/mot/123-bluetooth
[8] http://www.futura-sciences.com/magazines/high-tech/infos/dico/d/internet-wi-fi-1648/
[9] http://www.futura-sciences.com/magazines/high-tech/infos/dico/d/internet-3g-2008/
[10] http://compnetworking.about.com/od/networkprotocols/g/ultra_wide_band.htm
[11] http://www.dicodunet.com/definitions/multimedia/zigbee.htm
[12] http://faitmain.org/volume-2/xbee-arduino.html
[13] http://faitmain.org/volume-2/xbee-arduino.html
[14] http://raspberrypi.electroniquemagazine.com/raspberrypi.html
[15] https://www.arduino.cc
[16] https://docs.python.org/release/1.5.1p1/tut/functions.html](https://image.slidesharecdn.com/rapportinterfaceterminal-160522222549/85/Rapport-interface-terminal-58-320.jpg)
![Bibliographie
42
[17] http://www.futura-sciences.com/magazines/matiere/infos/dico/d/physique-resistance-
electrique-364/
[18] http://www.larousse.fr/dictionnaires/francais/transistor/79147
[19] http://www.linternaute.com/dictionnaire/fr/definition/relais-electrique/
[20] http://www.techno-science.net/?onglet=glossaire&definition=13521](https://image.slidesharecdn.com/rapportinterfaceterminal-160522222549/85/Rapport-interface-terminal-59-320.jpg)

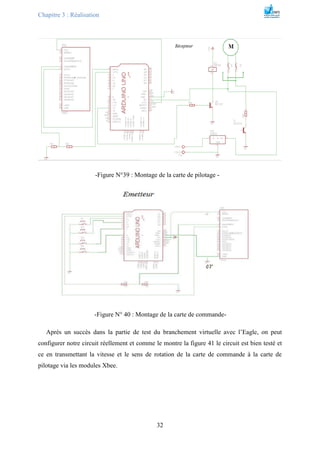
Ce document est un mémoire de licence fondamentale en informatique et multimédia, décrivant un projet de commande à distance d'un chariot industriel via des technologies de communication sans fil, notamment Zigbee. Il détaille le contexte, les spécifications, les technologies utilisées (comme Arduino et Raspberry Pi) et la réalisation pratique de ce projet. Le rapport met en avant l'importance des systèmes embarqués dans divers domaines, ainsi que les bénéfices d'une ergonomie améliorée pour l'utilisateur.





























![[PFE] Master - Génie logiciel](https://cdn.slidesharecdn.com/ss_thumbnails/pfemaster2-170829224941-thumbnail.jpg?width=640&height=640&fit=bounds)
















