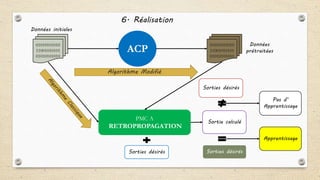
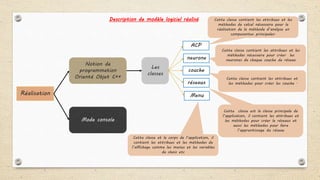
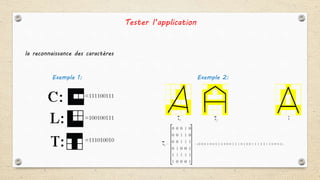
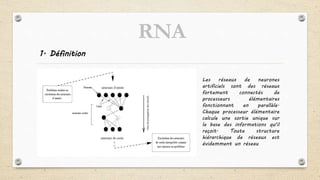
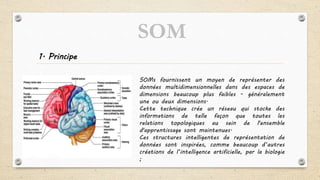
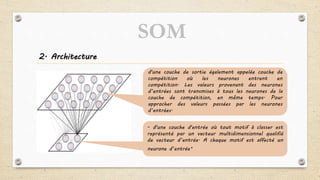
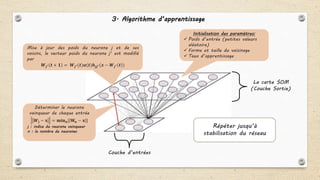
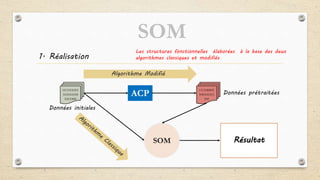
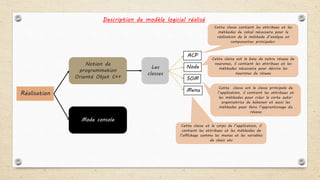
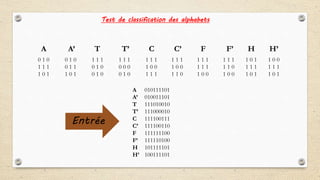
Ce document présente un projet de fin d'études portant sur l'étude et la réalisation d'un modèle de réseaux de neurones artificiels, incluant divers types d'apprentissage tels que supervisé et non supervisé. Il détaille les principes fondamentaux comme l'Analyse en Composantes Principales (ACP) et les différentes structures des réseaux de neurones, tout en illustrant l'application de ces concepts à travers des algorithmes tels que la Carte Auto-Organisatrice de Kohonen et le Perceptron Multicouche. Enfin, il aborde les réalisations pratiques et les tests effectués, notamment dans le domaine de la classification et de la reconnaissance.












![x1
x3
x2
O2
O1
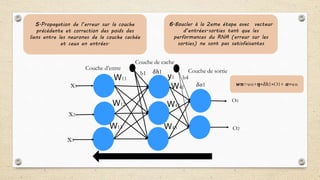
W11
Couche d’entre
Couche de cache
𝛿𝑜1
𝛿ℎ1
W41
W42
W43
y1
W13
W12
Couche de sortieb1
b4
4 . Correction des poids des liens
entre les neurones de la couche de
sortie et de la première couche
cachée selon l’erreur présente en
sortie
𝛿𝑜i = 𝒻 ′( 𝒴𝒿𝒲𝒿𝓀 + 𝑏𝑖) ∗ (𝑑i − Oi)
𝛿ℎj = 𝒻 ′( 𝑥𝑖𝒲𝑖𝑗 + 𝑏𝑗 )( 𝛿𝑜𝑖𝑤𝑖𝑗)
𝒘𝒏=wn+𝜼∗𝛿𝑜1∗O1+ 𝜶∗wn
𝒻′ 𝓍
= 𝒻 𝓍 [1 − 𝒻 𝓍 ]](https://image.slidesharecdn.com/prsentationpfe-160923220159/85/Presentation-pfe-50-320.jpg)