Télécharger en tant que PDF, PPTX
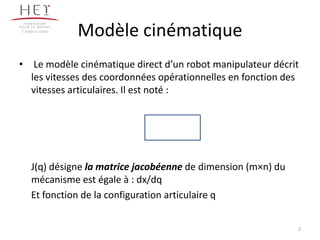
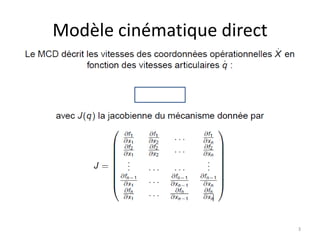
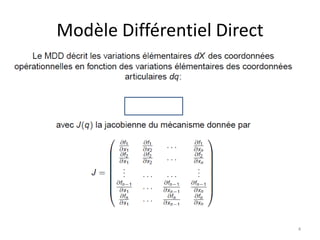
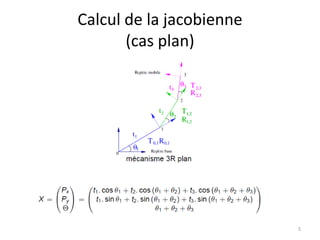
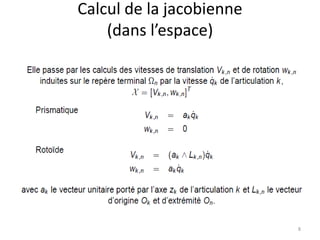

Le document traite du modèle cinématique direct des robots manipulateurs, notamment la dérivation de la matrice jacobéenne qui relie les vitesses opérationnelles aux vitesses articulaires. Il aborde également la problématique des singularités et la génération de mouvements, en précisant comment définir un chemin pour un robot dans différents espaces. Les trajectoires des robots sont classifiées selon différentes méthodes de déplacement entre les points, qui peuvent inclure des mouvements libres ou contraints.




















































































