Téléchargé 217 fois
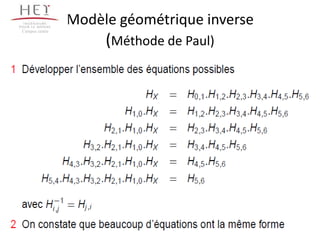
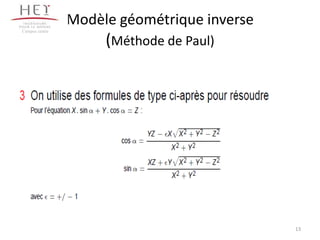
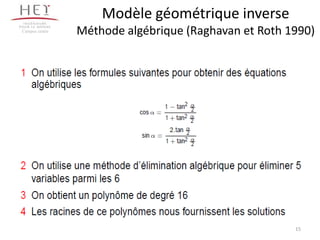
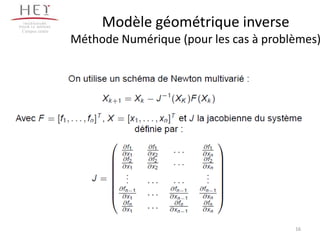
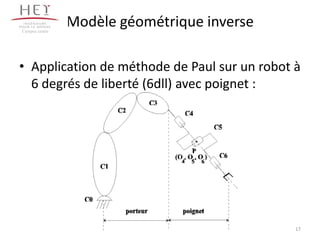

Le document traite de la modélisation des bras manipulateurs, en expliquant la configuration d'un bras et les modèles géométriques direct et inverse. Il souligne l'importance des coordonnées généralisées pour définir la position et l'orientation de l'organe terminal (ot) ainsi que les différentes méthodes pour résoudre le modèle géométrique inverse. Enfin, il présente des approches classiques, algébriques et numériques pour obtenir les configurations requises d'un bras manipulateur.
































































