Téléchargé 26 fois

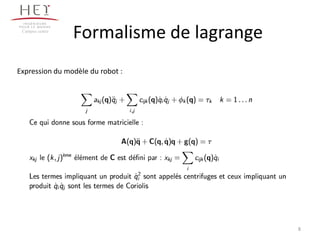

Le document traite des modèles dynamiques direct et inverse pour exprimer la relation entre diverses forces et les grandeurs cinématiques d'un système. Il examine les équations différentielles non linéaires et l'utilisation des formalismes d'Euler-Newton et de Lagrange pour évaluer les caractéristiques mécaniques des actuateurs. L'approche de Lagrange est décrite comme plus systématique mais plus complexe numériquement.






























































