Télécharger en tant que PDF, PPTX
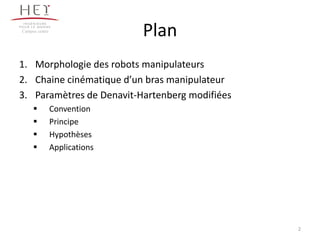

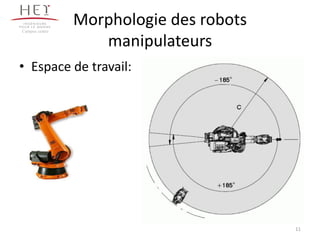
![Morphologie des robots
manipulateurs
Campus centre
6
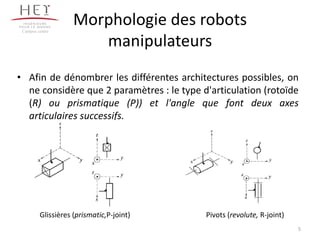
Articulation prismatique, noté P
1 ddl en translation Tx .
Valeur articulaire q = longueur [m].
Articulation rotoïde, noté R
1 ddl en rotation Rx .
Valeur articulaire q = angle [rad], [].](https://image.slidesharecdn.com/chapitre3robotiquee-130924072250-phpapp02/85/Chapitre-3-robotique-e-6-320.jpg)

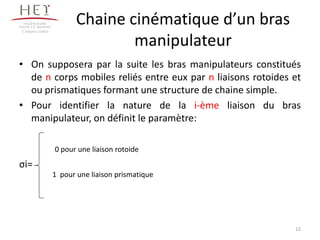
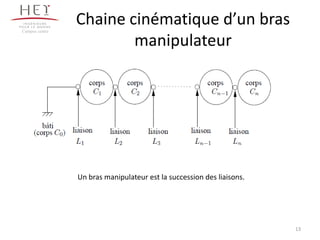
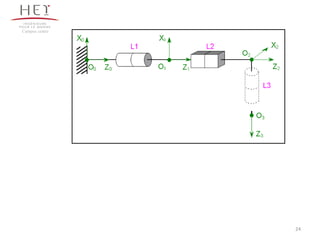
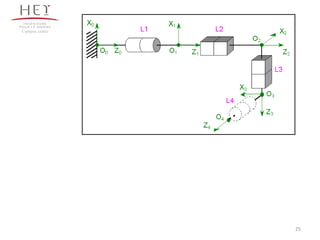
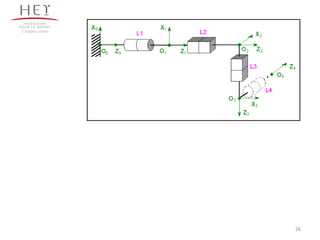
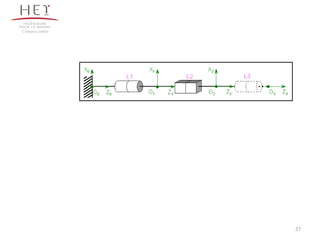
![Chaine cinématique d’un bras
manipulateur
Campus centre
14
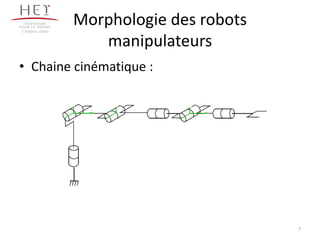
Coordonnées généralisé X = [P,R]
(position P / orientation R)
Coordonnées articulaire q
(consignes données aux moteurs : soit rotation autour d’un axe soit
translation suivant un axe)
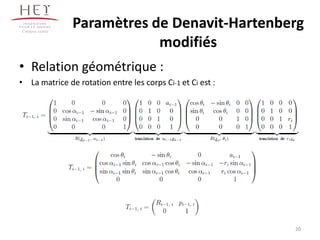
Paramètres géométriques Ϛ qui définissent de façon statique les dimension
du robot](https://image.slidesharecdn.com/chapitre3robotiquee-130924072250-phpapp02/85/Chapitre-3-robotique-e-14-320.jpg)
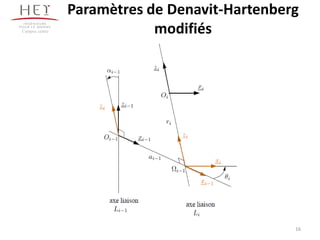
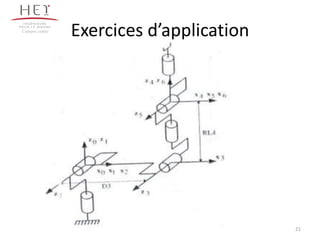
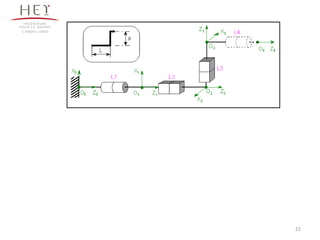
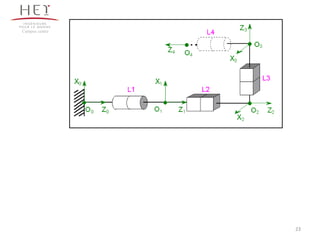

Le chapitre 3 se concentre sur la morphologie des bras manipulateurs, en abordant les mécanismes, la chaîne cinématique et les paramètres de Denavit-Hartenberg. Il décrit les différents types d'articulations et leurs représentations ainsi que les architectures en série et parallèle. Le document propose également des exercices d'application pour illustrer les concepts présentés.













































































