Téléchargé 112 fois



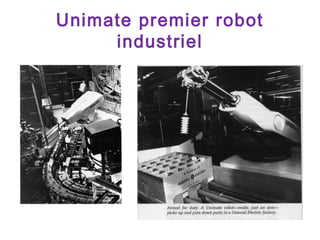
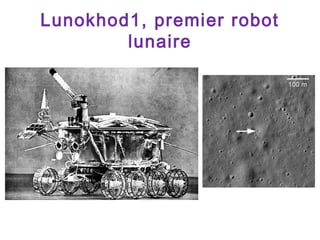














Le document définit un robot comme une machine autonome ou commandée à distance, présentant des caractéristiques telles qu'un corps, des programmes d'exécution et des capteurs. Il cite des exemples de robots dans divers environnements et aborde les célèbres lois de la robotique d'Isaac Asimov. De plus, il mentionne les premiers robots et des références culturelles liées aux robots.















































