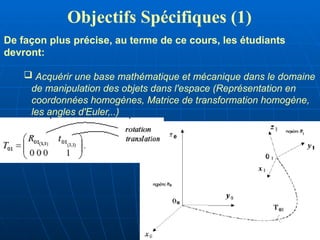
Ce document présente le contenu d'un cours sur les robots industriels articulés, abordant leurs modèles, méthodes de programmation et de simulation. Les étudiants acquerront des compétences en mathématiques et en mécanique, ainsi qu'une compréhension des diverses architectures de robots et de leur modélisation. Le cours intègre des cours magistraux, des travaux pratiques, et une évaluation équilibrée entre examens et travaux pratiques.